工业套装4.0 使用说明
在工业套装4.0进行安装和使用之前,请先查看本款机械臂的简介,了解产品,并对机械臂进行使用前的学习和调整。
1 安装套装
1.1 请根据myCobot工业4.0套装 安装教程,按照教程对套装进行初步安装。
1.2 本次更新了套装设备,请参照下图更新设备及设备连接方式:
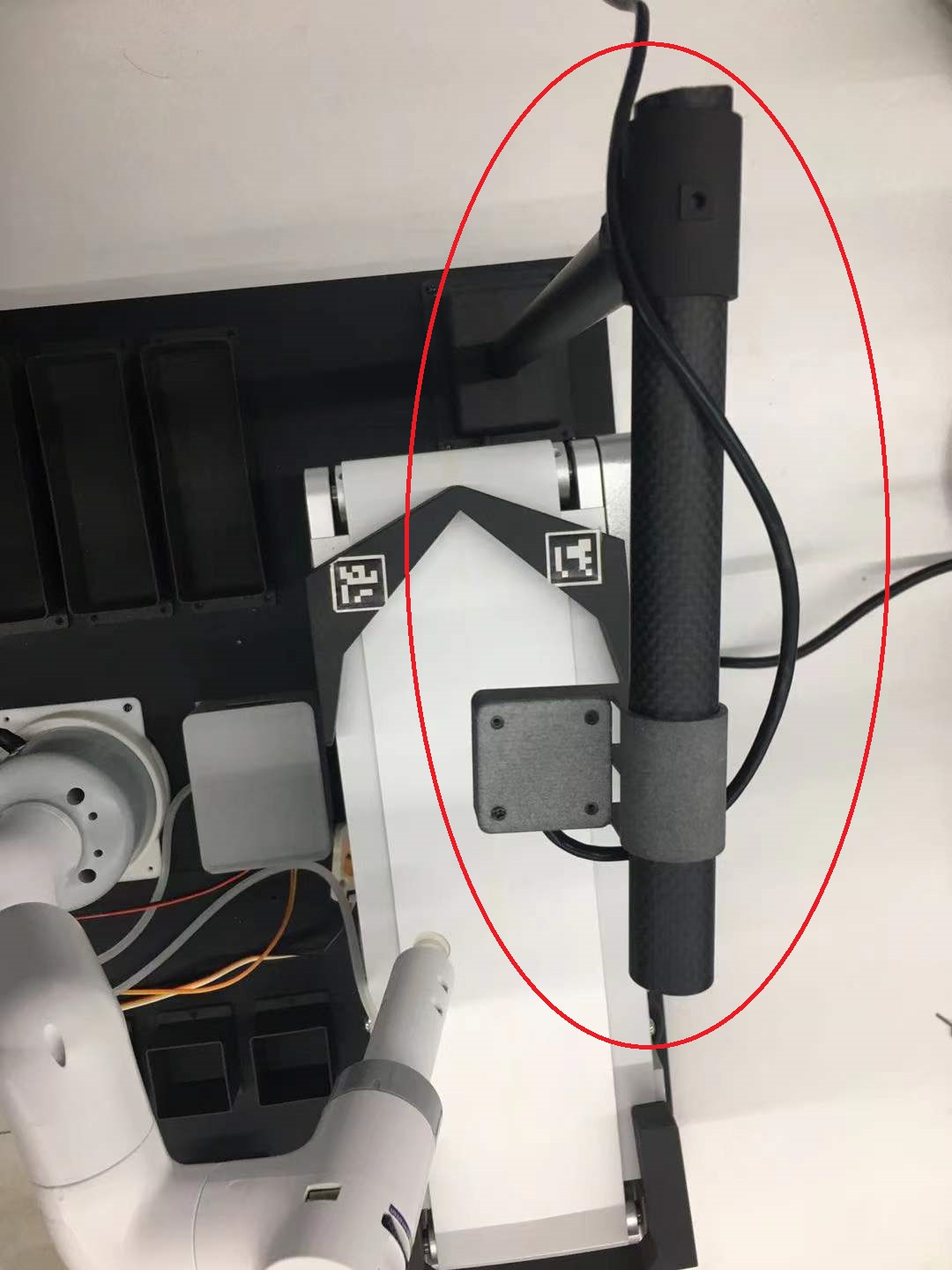 更换了支持范围更大的摄像头支架和新的摄像头
更换了支持范围更大的摄像头支架和新的摄像头
 tof接口的位置更换
tof接口的位置更换
 新增二维码,以划分识别范围
新增二维码,以划分识别范围
2 Python安装
本教程使用Python语言,如果您未安装Python,可以按照此安装教程进行安装 建议选择较新的版本进行安装
PS:如果您已经安装了Python,可以跳过这个步骤
3 安装第三方包
通过终端或者编译软件进行Python第三方包的安装,安装指令如下:
pip install --upgrade pip
pip install opencv-python
pip install opencv-contrib-python
pip install numpy
4 代码说明
# mode=1,颜色识别
# mode=2,图像识别
mode = 1
# 超过该值则没有物体在盒子里,没超过则有物体在盒子里
# 仅支持中间的盒子
THRESHOLD = 30
# 设置运行程序时的机械臂初始坐标
POSITION_INITIAL_X = 168.2
POSITION_INITIAL_Y = -84.1
POSITION_INITIAL_Z = 248.2
# 设置抓取右边物块前的坐标
CATCH_FROM_BOX_X = 35.6
CATCH_FROM_BOX_Y = -180.7
CATCH_FROM_BOX_Z = 165.5
# 设置将物块放置在传送带上的坐标
PUT_CUBE_X = 210.3
PUT_CUBE_Y = -113.8
PUT_CUBE_Z = 265.9
# 设置吸取传送带物块之前的坐标(建议不改动)
BEFORE_PUMP_X = 215.6
BEFORE_PUMP_Y = 59.2
BEFORE_PUMP_Z = 261.0
以上坐标分别对应各个预备点位的坐标,X轴正方向为机械臂前方,Y轴正方向为机械臂左方,Z轴正方向为上方。 阈值可根据自己放置的物块的高度进行调整
可以使用:
print(detect.mc.get_tof_distance())
查看当前距离值,并对阈值进行适当的调整
def run():
global move_count,mode
# get which mode should be run
get_mode = mode
cap_num = 1
cap = cv2.VideoCapture(cap_num)
if not cap.isOpened():
cap.open()
if get_mode != 1:
goal = []
path = os.getcwd()+'/local_photo/img'
print(path)
for i,j,k in os.walk(path):
for l in k:
goal.append(cv2.imread('local_photo/img/{}'.format(l)))
# init a class of Object_detect
detect = Object_detect("COM9", 115200)
1、该部分代码cap_num的值对应电脑自带的或外接的摄像头,请根据实际情况适当修改,一般情况下0、1、2三种情况就能找到需求的摄像头
2、detect = Object_detect("COM9")部分请根据实际机械臂的串口号进行修改
3、path输出的路径为进行图像识别时可识别的图像的存放位置(可自行修改)
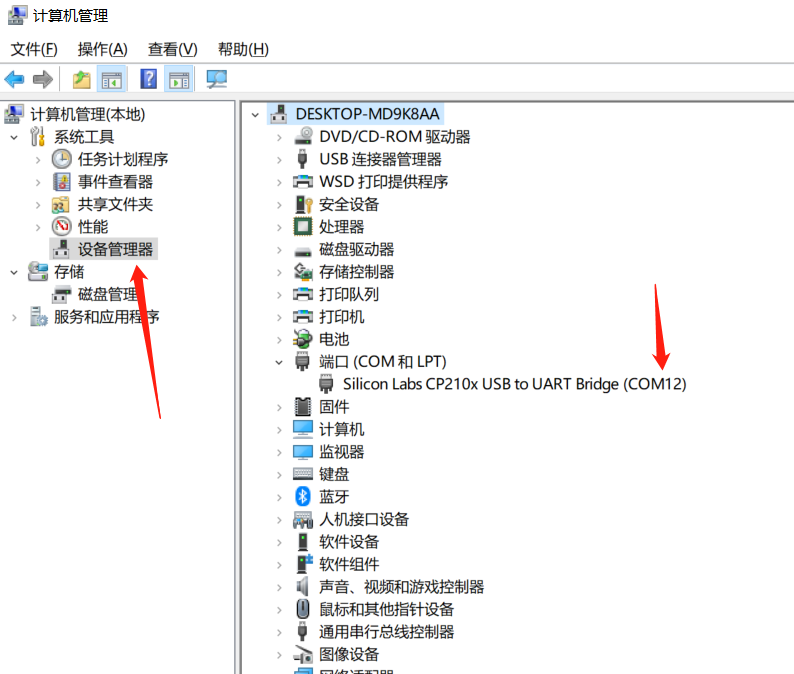
如何查看机械臂的串口号
1、右键'此电脑'打开管理
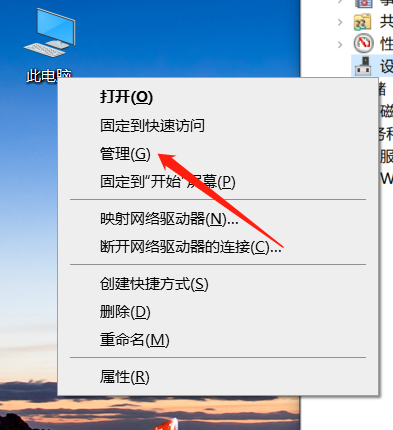
2、选择设备管理器并在右侧列表中查看端口
注意事项
请将摄像头的USB接口直接连接在电脑上,其他设备可以通过转接口接入电脑