注意:此功能必须在同一网络下使用,例如服务端和客户端都是使用同一手机热点或者同一局域网WiFi
开启服务器
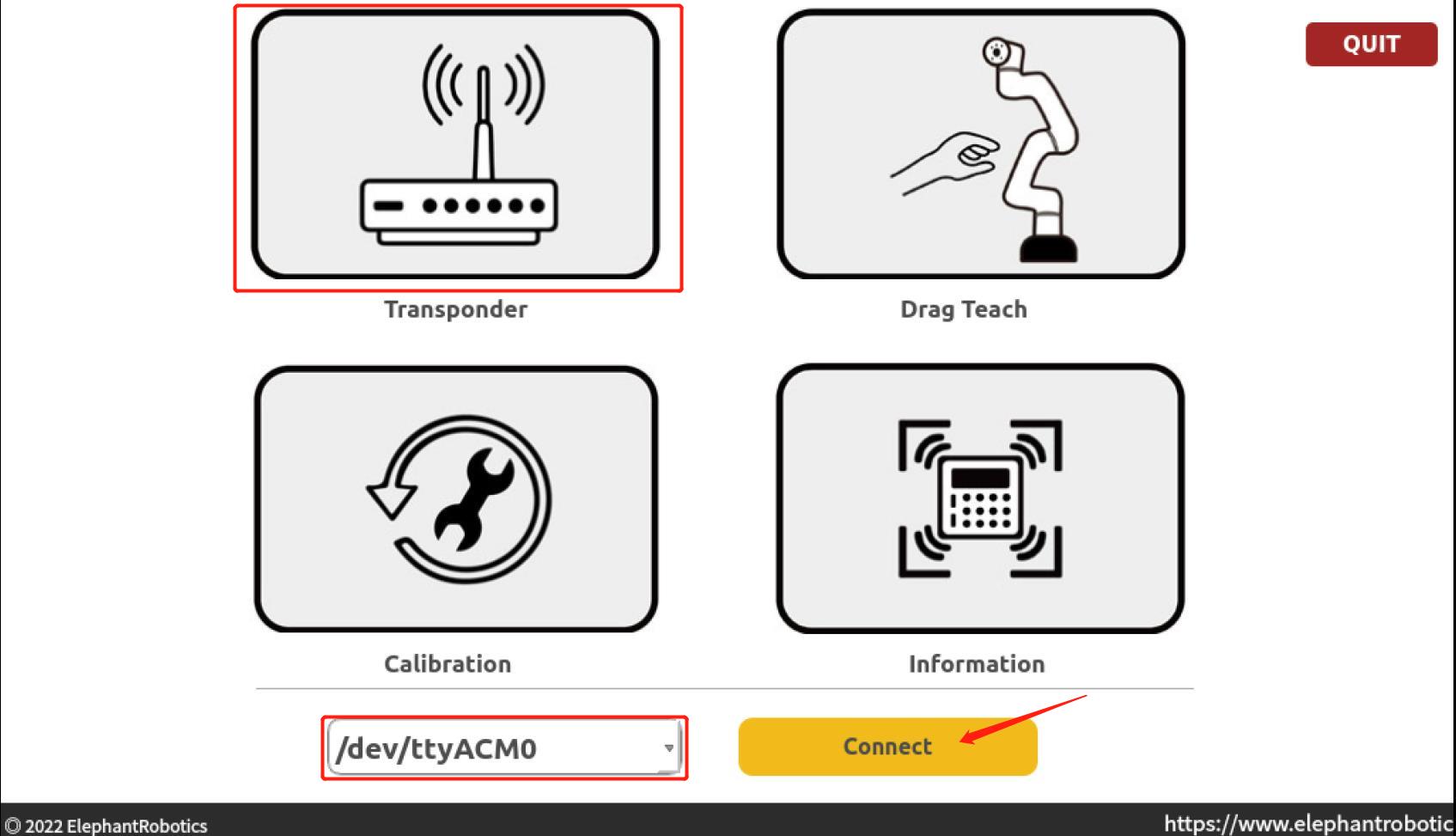
1.双击打开桌面上的myBuddyGUI软件

2.选择 “Transponder”, 端口选择 “/dev/ttyACM0”, 点击 “Connect”
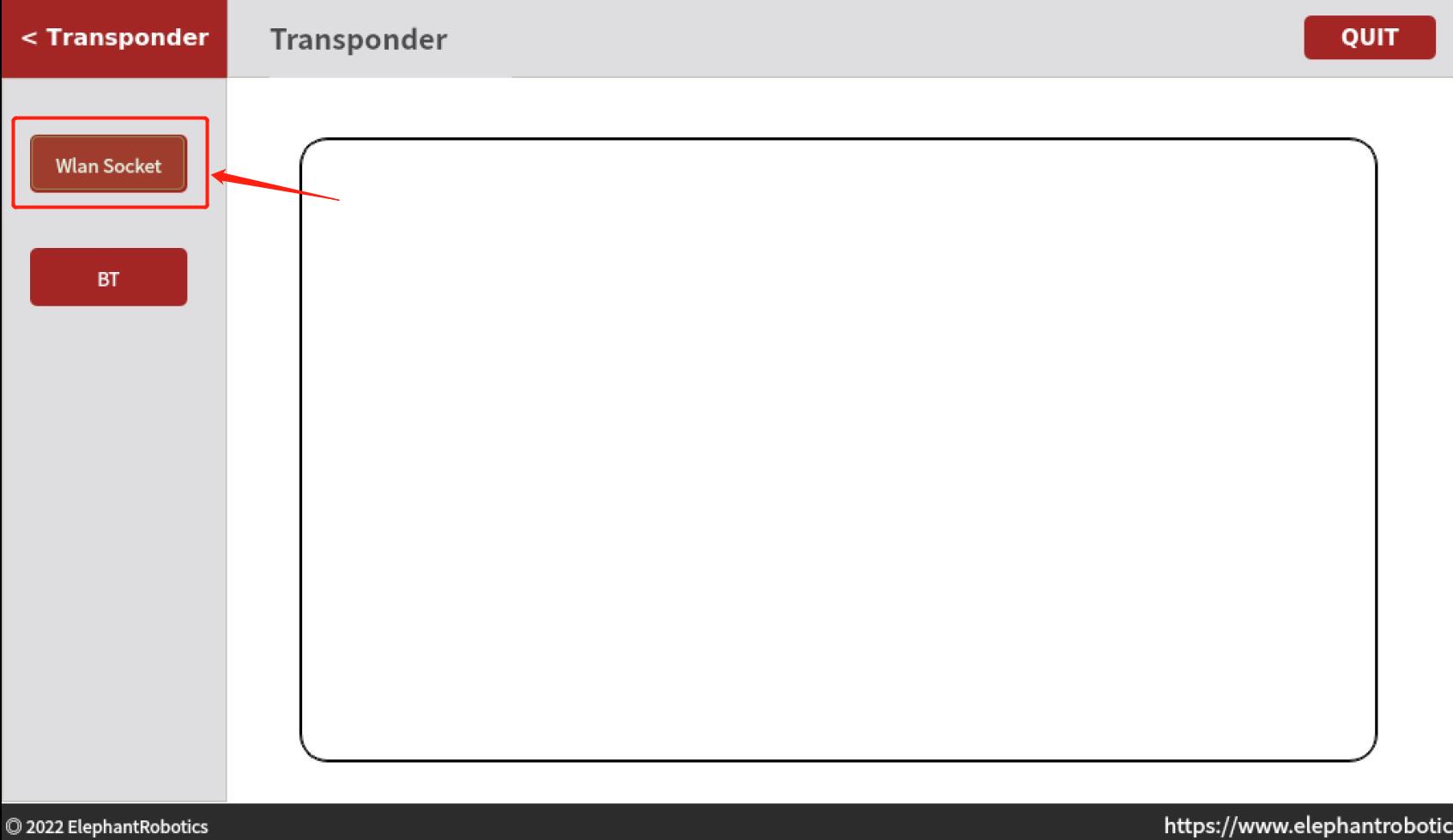
3.选择 "Wlan Socket"
4.点击 "OPEN" 打开服务器

若客户端成功连接到服务器,则页面显示"Connected",并开始接收数据:
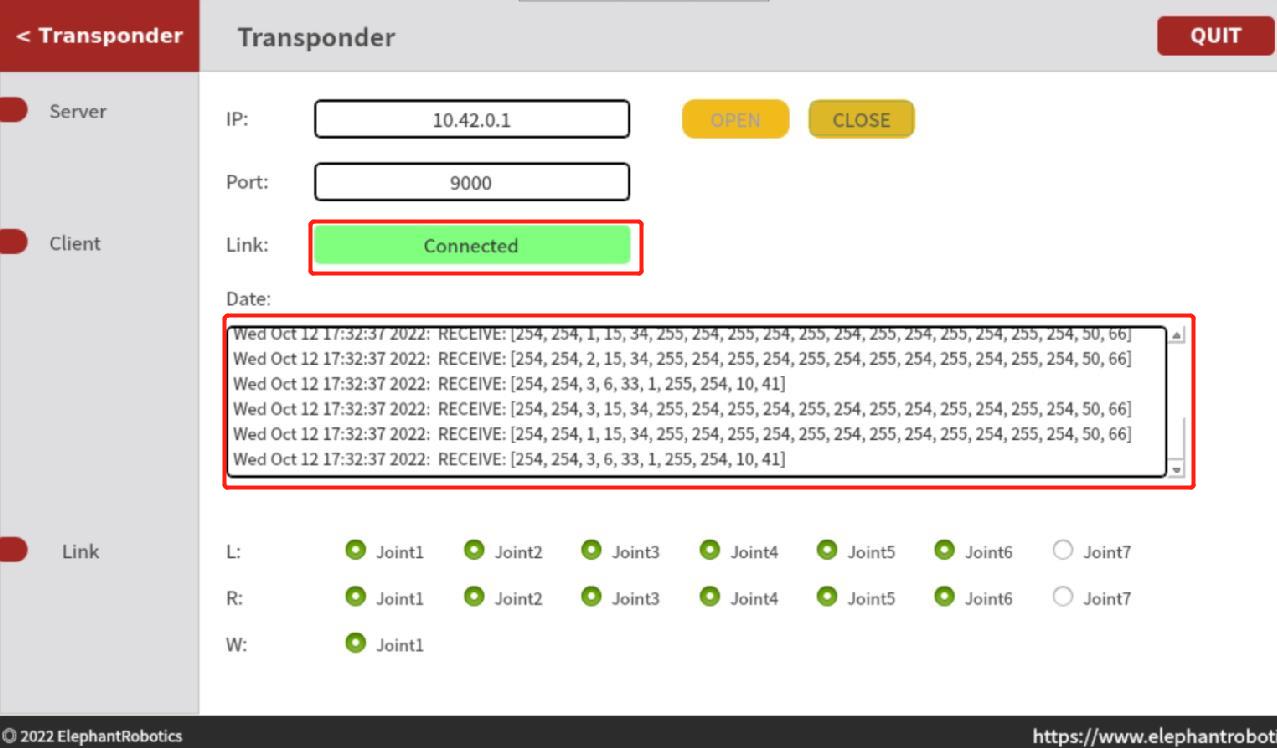
注意: 服务器中的IP并不是唯一的,可根据机械臂实际连接的网络确定。
客户端
注意:需确保远程PC端已经完成ROS环境搭建,具体可参考 12.1.2 环境搭建
启动ROS节点
ROS 系统的启动需要一个 ROS Master,即节点管理器,我们可以在终端输入 roscore 指令来启动 ROS Master。打开一个控制台终端(快捷键Ctrl+Alt+T),在终端执行以下命令:
roscore
当显示如下界面,则表示 ROS 节点启动成功
注意: 在执行启动ros节点前,第一步都需要执行roscore。
1 滑块控制
打开一个控制台终端(快捷键Ctrl+Alt+T),运行:
roslaunch mybuddy_socket slider_control.launch
它将打开 rviz 和一个滑块组件,你将看到如下画面:

接着你可以通过拖动滑块来控制 rviz 中的模型移动。如果你想让真实的 mybuddy 跟着一起运动,需要再打开一个控制台终端(快捷键Ctrl+Alt+T),运行:
注意: 因使用不同网络,可在 ~/catkin_ws/src/mycobot_ros/Mybuddy/mybuddy_socket/scripts/slider_control.py中修改对应的IP地址,确保与服务器的IP保持一致。
rosrun mybuddy_socket slider_control.py
请注意:由于在命令输入的同时机械臂会移动到模型目前的位置,在您使用命令之前请确保rviz中的模型没有出现穿模现象。 不要在连接机械臂后做出快速拖动滑块的行为,防止机械臂损坏。
2 模型跟随
除了上面的控制,我们也可以让模型跟随真实的机械臂运动。打开一个控制台终端(快捷键Ctrl+Alt+T),运行:
注意: 因使用不同网络,可在 ~/catkin_ws/src/mycobot_ros/Mybuddy/mybuddy_socket/scripts/follow_display.py中修改对应的IP地址,确保与服务器的IP保持一致。
rosrun mybuddy_socket follow_display.py
然后打开另一个控制台终端(快捷键Ctrl+Alt+T),运行:
roslaunch mybuddy_socket mybuddy_follow.launch
它将打开 rviz 展示模型跟随效果。
3 myBuddy Moveit
mycobot_ros 现已集成了 MoveIt 部分。
打开一个控制台终端(快捷键Ctrl+Alt+T),运行:
roslaunch mybuddy_socket_moveit demo.launch
如果需要让真实的机械臂同步执行计划,需要再打开一个控制台终端(快捷键Ctrl+Alt+T),运行:
注意: 因使用不同网络,可在 ~/catkin_ws/src/mycobot_ros/Mybuddy/mybuddy_socket_moveit/scripts/sync_plan.py中修改对应的IP地址,确保与服务器的IP保持一致。
rosrun mybuddy_socket_moveit sync_plan.py
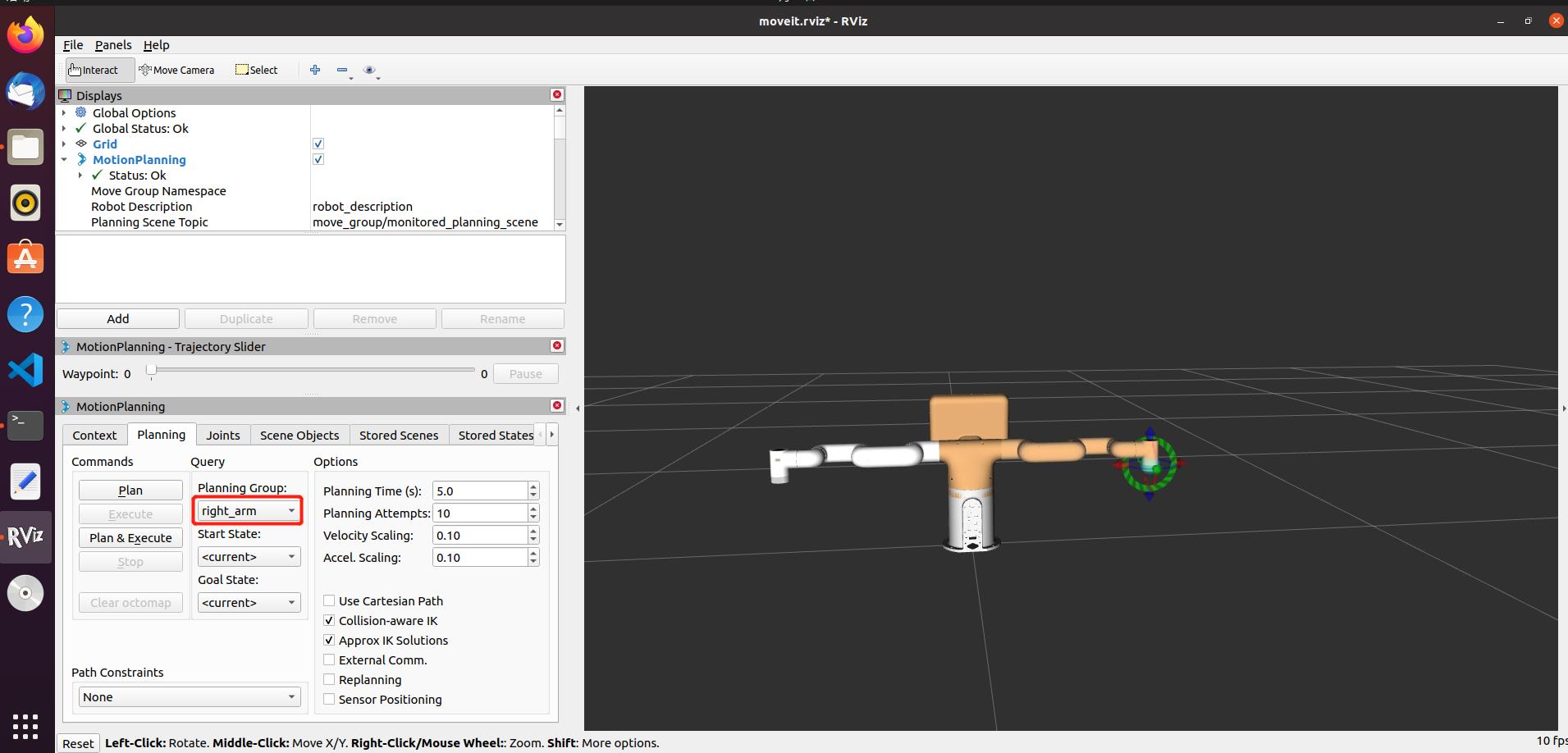
Moveit 的控制组有两个,运行效果如下:
1.左臂控制组:通过拖动轨迹球来规划左臂的运动方向。
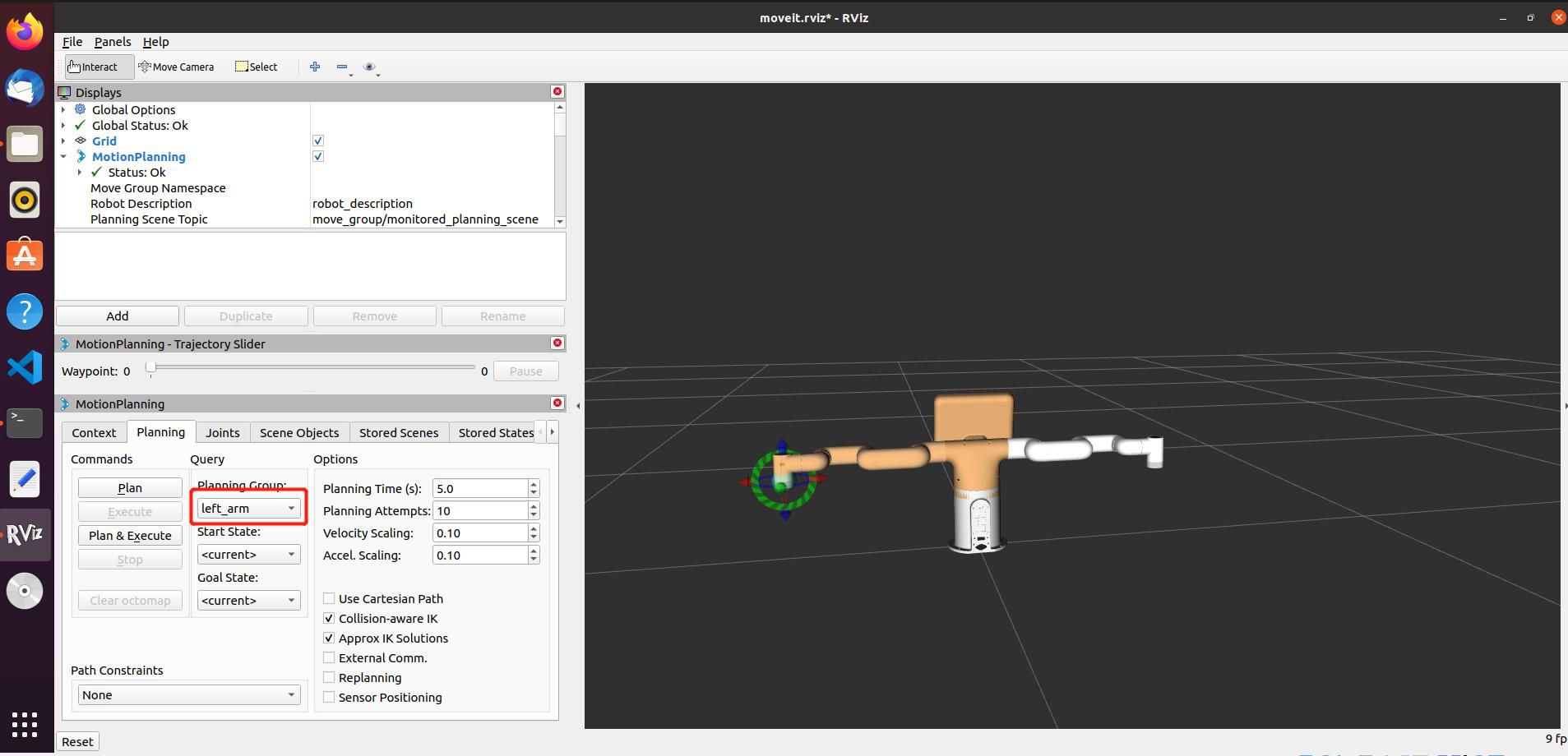
2.右臂控制组:通过拖动轨迹球来规划右臂的运动方向。