myCobot PRO 600 Moveit
mycobot_ros 现已集成了 MoveIt 部分。
打开命令行运行:
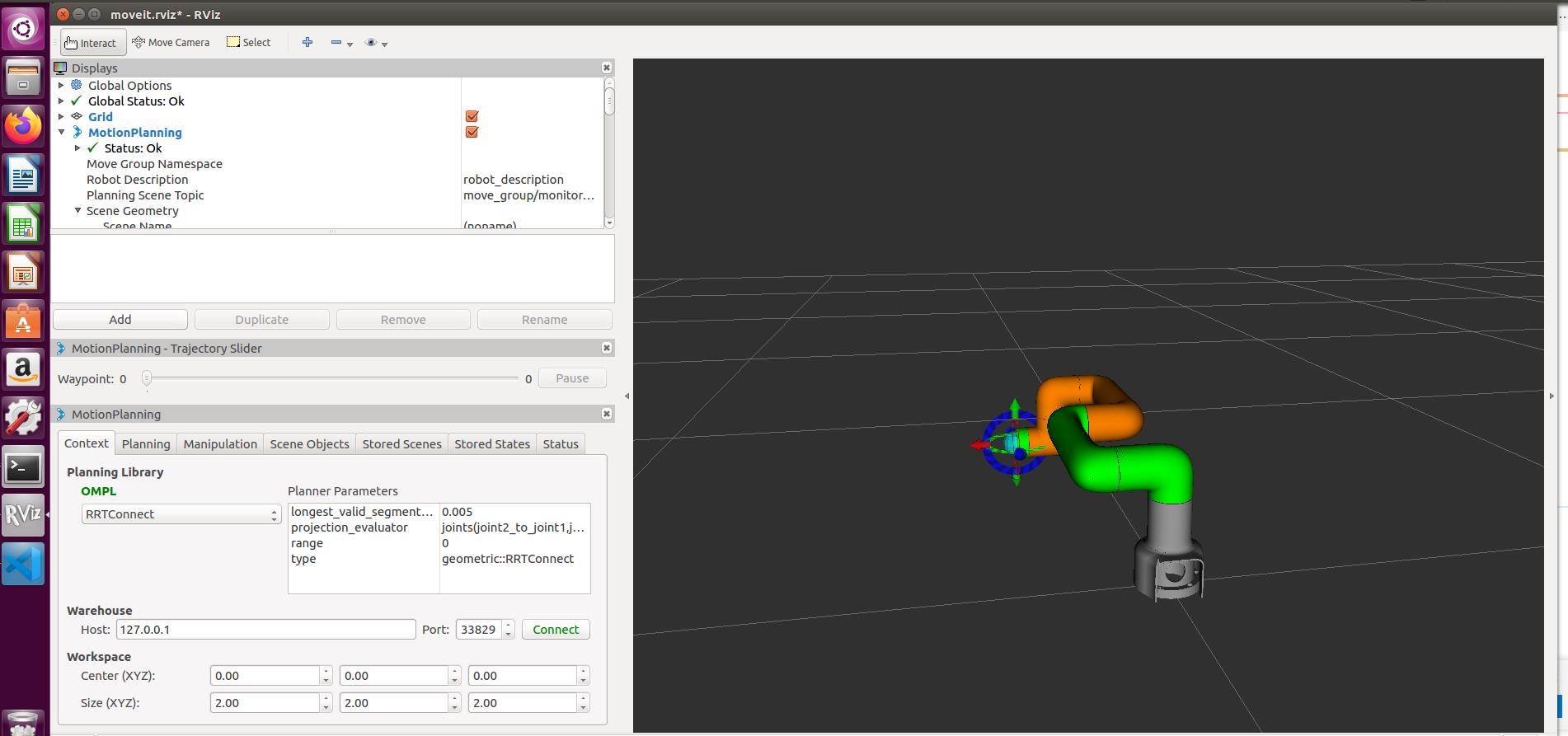
roslaunch mycobot_600_moveit mycobot600_moveit.launch
运行效果如下:
如果需要让真实的机械臂同步执行计划,需要再打开一个命令行,运行:
# mycobot pro 600 默认IP为"192.168.10.159",端口号为5001.具体IP以实际机械臂连接的网络为准.
rosrun mycobot_600_moveit sync_plan.py