文档目录
介绍
1 大象机器人
1 公司简介
2 my系列发展历程
3 如何阅读
2 产品介绍
2.1 myCobot 280
2.1.1 280-M5
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.1.2 280-Pi
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.1.3 280-JN
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.1.4 280-Arduino
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.2 myCobot 320
关于2020款和2022款区别说明
2.2.1 320-M5 2022款
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.2.2 320-Pi 2022款
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.2.3 320-M5 2020款
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.2.4 320-Pi 2020款
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.3 myCobot Pro 600
1 机器人参数介绍
2 机械臂电气接口
3 开箱与安装
4 开发环境与搭建
5 Socket API
2.4 myPalletizer 260
2.4.1 260-M5
1 机器人参数介绍
2 机器人电气接口
3 开箱与首次使用
4 开发环境与搭建
2.4.2 260-Pi
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.5 myAGV
2.6 mechArm 270
2.6.1 270-Pi
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.6.2 270-M5
1 机器人参数介绍
2 机械臂电气接口
3 开箱与首次使用
4 开发环境与搭建
2.7 Mira API使用
2.8 配件
1 平面底座
2 G型底座
3 吸盘底座
4 大吸盘底座
5 吸泵
6 自适应夹爪 2019款
7 自适应夹爪 2022款
8 摄像头法兰
9 模块吸盘
10 电动夹爪
11 气动夹爪
2.9 高级套装
1 人工智能套装
2 工业4.0套装
开发前的准备
3 机械臂知识快速学习
1 串联机器人
2 电子背景知识
3 力学背景知识
4 电机与舵机知识
4 基础功能应用
4.1 myStudio
1 安装驱动
2 更新设备固件
4.2 出厂固件介绍
4.2.1 拖动示教
1 微控制器类
2 微处理器类
4.2.2 零位校准
1 微控制器类
2 微处理器类
4.2.3 通讯转发
1 微控制器类
2 微处理器类
4.2.4 连接检测
1 微控制器类
2 微处理器类
4.3 首次使用
开发与使用
5 基于 Blockly 的开发使用
5.1 myblockly
1 控制RGB灯板
2 控制机械臂回原点
3 控制单关节运动
4 控制多个关节
5 控制机械臂左右摆动
6 控制机械臂跳舞
7 夹爪安装与使用
8 吸泵安装与使用
5.2 UIFlow
1 UIFlow环境搭建
2 UIFlow使用手册
3 UIFlowIO控制
4 UIFlow关节控制
5 UIFlow坐标控制
6 UIFlow夹爪控制
7 UIFlow使用案例
6 基于 RoboFlow 开发使用
1 环境搭建
2 简单使用
3 关节控制 & 坐标控制
4 IO控制
5 夹爪控制
6 MODBUS
7 基于 Python 开发使用
1 环境搭建
2 关节控制
3 坐标控制
4 IO控制
5 夹爪控制
6 TCP/IP
7 使用案例
8 API说明
8 基于 C++ 开发使用
1 环境搭建
2 编译运行
3 关节控制
4 坐标控制
5 IO控制
6 夹爪控制
7 API说明
8 使用案例
9 基于 C# 开发使用
1 环境搭建
2 编译运行
3 关节控制
4 坐标控制
5 IO控制
6 夹爪控制
7 API说明
8 使用案例
10 基于 Arduino 开发使用
1 环境搭建
2 简单使用
3 库的使用
4 API说明
11 基于 JavaScript 开发使用
1 开发前准备
2 开发准备
3 IO控制
4 关节控制
5 夹爪控制
6 什么是JS
7 使用案例
8 API说明
12 基于 ROS 开发使用
12.1 ROS 1
12.1.1 介绍
12.1.2 环境搭建
12.1.3 ROS基础
12.1.4 rivz介绍及使用
1 myCobot 280
2 myPalletizer_260
3 mechArm_270
4 myCobot 320
5 myCobot PRO 600
12.1.5 moveit
1 myCobot 280
2 myPalletizer_260
3 mechArm_270
4 myCobot 320
5 myCobot PRO 600
12.2 ROS 2
12.2.1 ROS2的安装
12.2.2 基础教程
1 基础教程
2 日志
3 创建命令
4 配置信息
5 QT工具箱
6 接口文件
7 RCLPY
8 rosdep问题
9 启动文件
10 launch类层次
11 TF2
12 URDF
12.2.3 rivz介绍及使用
1 myCobot 280
2 myPalletizer 260
3 mechArm 270
4 myCobot 320
13 基于串口协议开发使用
周边与其他
14 高级套装使用
14.1 人工智能
1 环境
2 知识准备
3 颜色识别
myCobot 280
mechArm 270
myPalletizer 260
4 图像识别
myCobot 280
mechArm 270
myPalletizer 260
14.2 移动机器人
14.2.1 VNC设置
14.2.2 实时建图
1 Gmapping实时建图
2 Cartographer实时建图
14.2.3 地图导航
14.2.4 ps2手柄控制
15 双臂协作机器人 myBuddy
15.1 产品介绍
15.2 产品参数介绍
1 产品结构参数介绍
2 产品电气接口介绍
15.3 产品初次使用
15.4 产品进阶应用
15.4.1 myBlockly
1 myBlockly安装
2 API说明
15.4.2 Python
1 IO控制
2 Tcp/Ip控制
3 关节控制
4 坐标控制
5 夹爪控制
6 蓝牙控制
7 API说明
15.4.3 ROS
1 Moveit
2 Rviz
3 Socket
16 常见问题FAQ
1 如何优雅提问
2 驱动相关
3 软件
4 硬件
Published with GitBook
在这篇文章中:
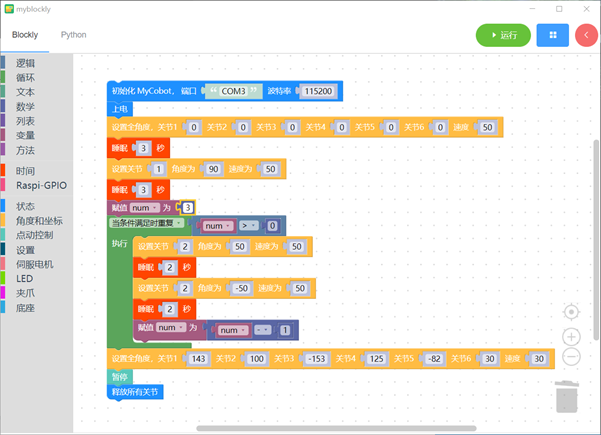
5 控制机械臂左右摆动
控制机械臂左右摆动
1 API简介
release_all_servos()、MyCobot(port)分别对应下图中的1、2
*API的更多信息请查看Python部分的讲解
2 简单演示
视频中进行拖拽演示。
results matching "
"
No results matching "
"