控制机械臂跳舞
自适应夹爪的安装:https://docs.elephantrobotics.com/docs/elephant-gitbook/7-EndOperator/7.1-gripperAg.html
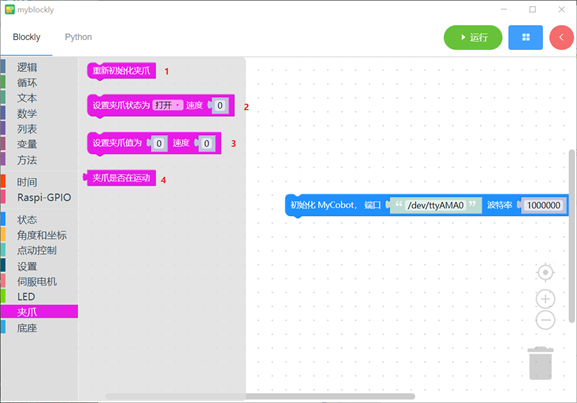
1 API简介
- set_gripper_state(flag,speed) 对应下图中的“2”
- set_gripper_value(value,speed) 对应下图中的“3”
- is_gripper_moving() 对应下图中的“4”
- set_encoder(joint_id,encoder) 对应“点动控制”中的

- get_encoder(joint_id) 对应“点动控制”中的

*API的更多信息请查看Python部分的讲解
2 简单演示
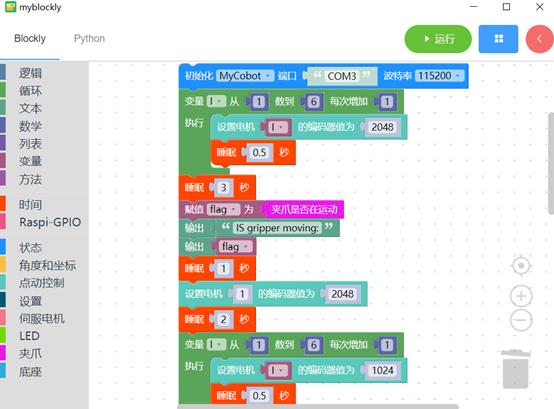

视频中进行拖拽演示。