TCPIP
使用 TCP/IP 控制机械臂
用户可以通过机械臂的IP地址连接机械臂,达到无需连接USB端口也可以远程操作机械臂的效果
注意:目前只支持Python3通过这个方式来使用机械臂,前提是有服务器并且已经开启。
连接前的操作
获取机械臂IP和端口
1 获取最新版的 Basic 固件与 Atom 固件,烧录方法
2 获取机械臂的IP和端口
M5版本:
机械臂底部显示屏选择第三个Transponder--再选择第二个WLAN Server
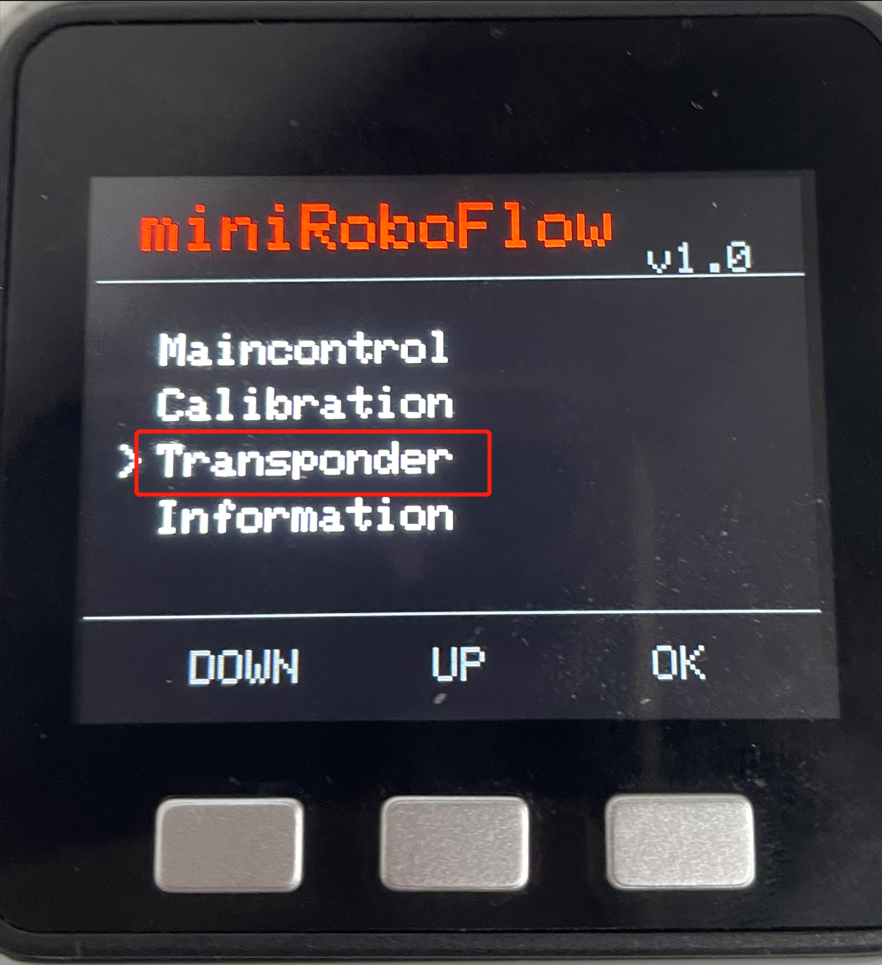
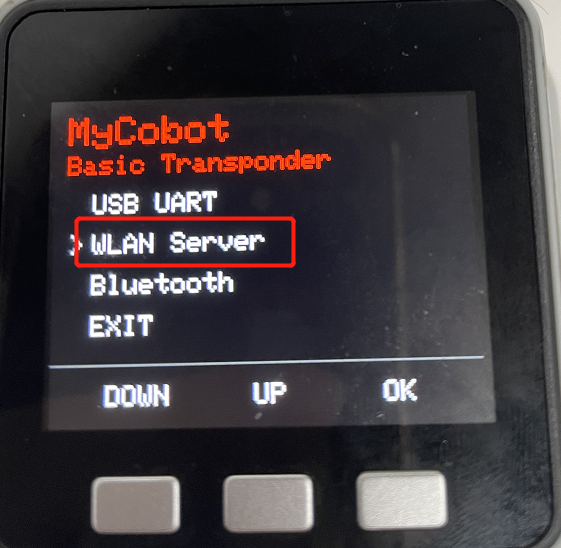
如图所示,已经显示了机械臂的IP和端口号了

PI版本:
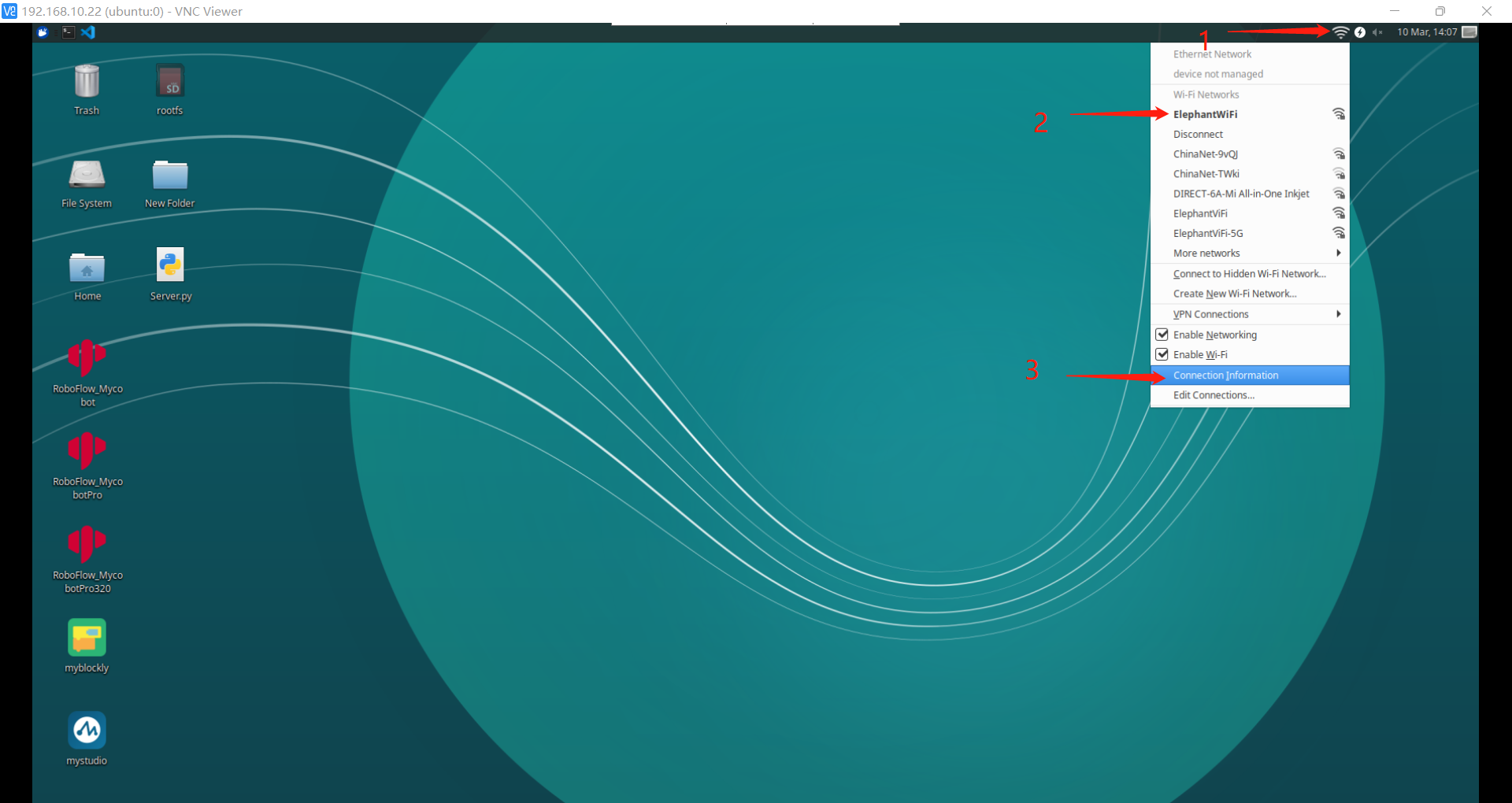
无线网络
点击WIFI图标,连接WIFI,并输入WIFI密码,点击 Connection Information 选项
有线网络
网线连接机械臂网口


点击Connection Information 即可查看到当前IP

注意:机械臂需要和控制端在同一网段下,即同一WIFI下
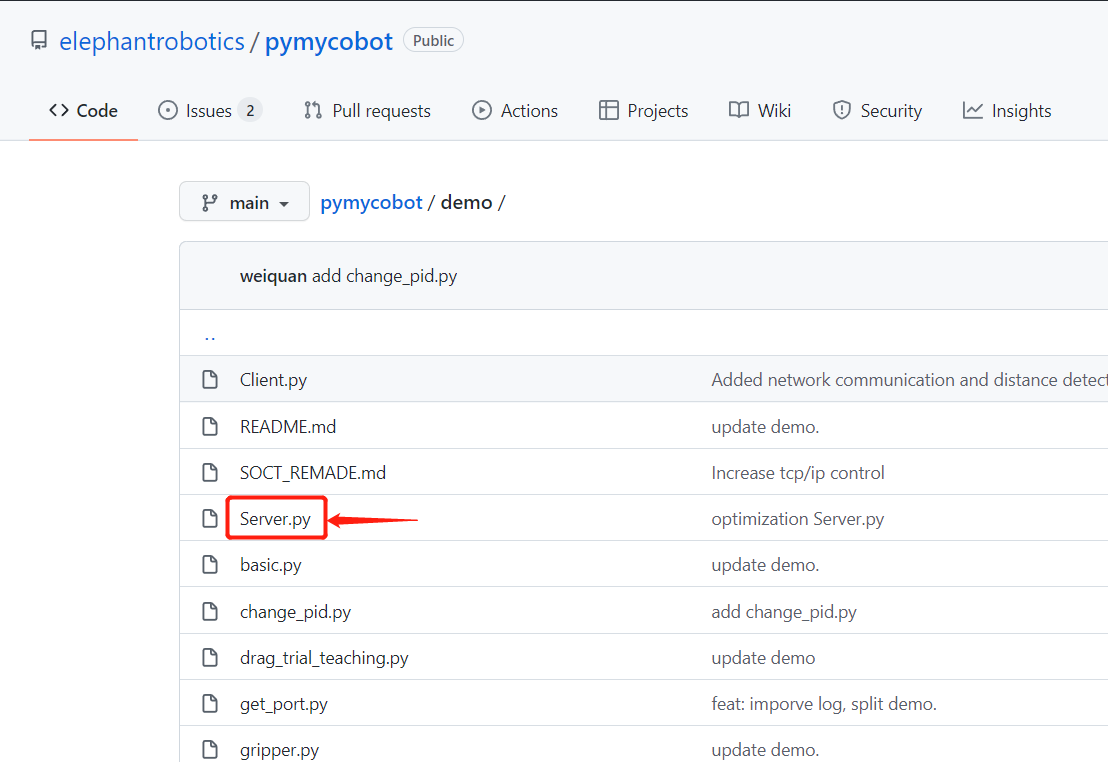
3 通过GitHub下载服务端文件Server.py,并机械臂系统上运行
4 打开命令终端
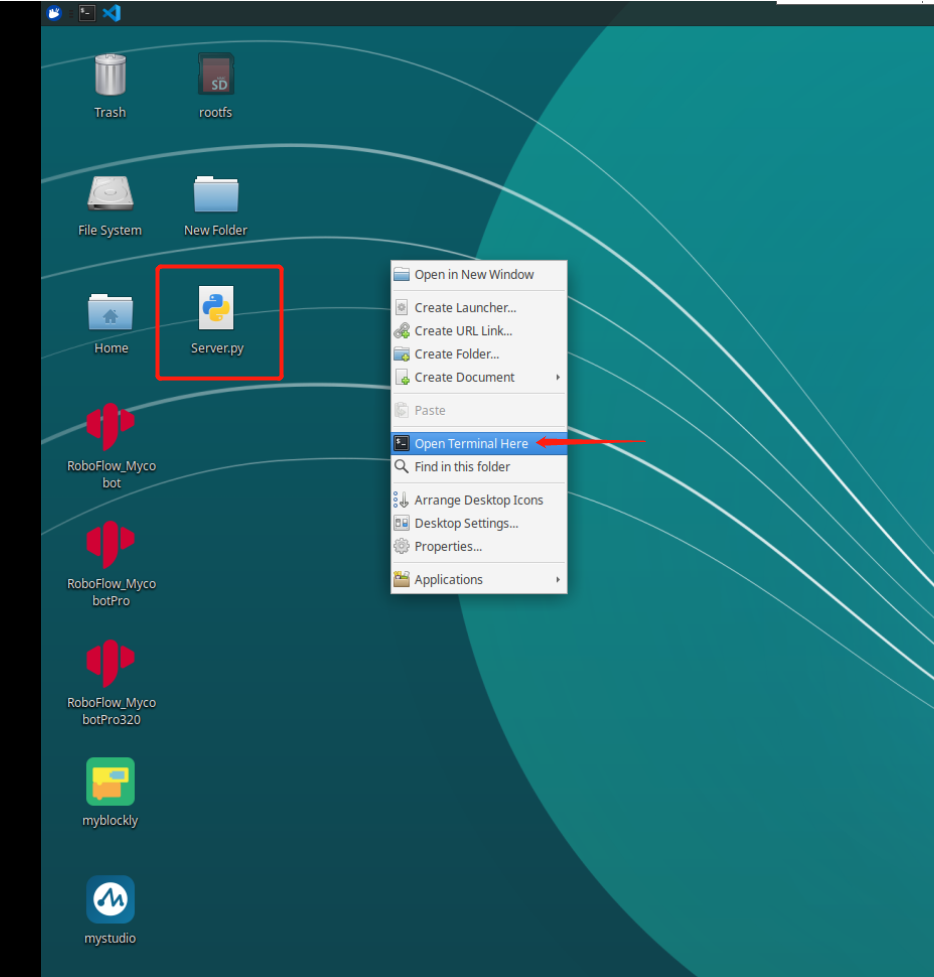
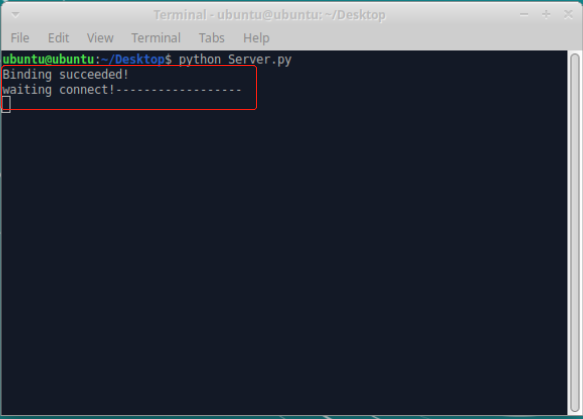
5 输入以下代码运行脚本:
python Server.py
运行成功如图:
插座控制
connect(serialport, baudrate, timeout)
- 功能:通过串口和波特率连接机械臂(适用于PI版本)
- 参数
serialport: (str) 默认/dev/ttyAMA0。baudrate:波特率默认1000000。timeout:默认0.1。
例子:
from pymycobot import MyCobotSocket
# 默认使用9000端口
#其中"192.168.10.22"为机械臂IP,请自行输入你的机械臂IP
mc = MyCobotSocket("192.168.10.22","9000")
#树莓派版本需要输入connect函数,默认值为("/dev/ttyAMA0","1000000")
#当机器型号为M5版本则不需要
#mc.connect()
#连接正常就可以对机械臂进行控制操作
mc.send_angles([0,0,0,0,0,0],20)
res = mc.get_angles()
print(res)
...