Power on and preliminary detection
1 Power on the Robot
Before operation, confirm that you have read Chapter 1 Safety Instructions to ensure safe operation. At the same time, connect the power adapter with the robotic arm, and fix the base of the robotic arm on the table. The connection method is shown in the figure.
myCobot must be powered on with an external power supply to provide sufficient power:
- Rated voltage: 12V
- Rated current: 3-5A
- Plug Type: DC 5.5mm x 2.1
You cannot just use the TypeC plugged into the M5Stack-basic for power supply. Please use the official power supply to avoid damage to the robotic arm.
2 Connecting with PC via USB
Connecting with PC via USB
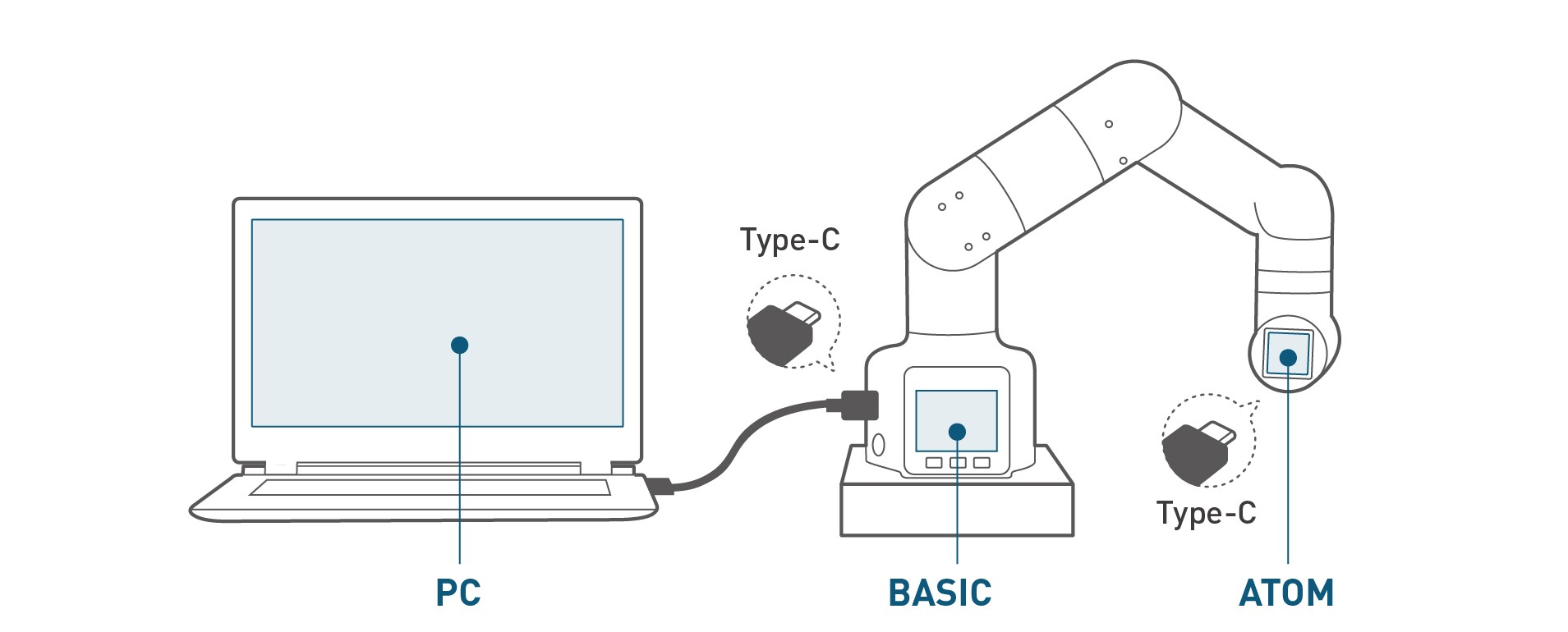
Figure 3-2 Schematic diagram of the USB interface
- Use Type-C cable to connect with PC and the corresponding USB interface of the robotic arm M5Stack-basic, and then check the connection. Connection detection is a function to check the connection status of the motors and Atoms, making it easy for customers to troubleshoot the robot.
Refer to MyCobot-280 for M5 Product Manual-3.4.3 Status Query Teaching for more information.
- After successful connection, the communication forwarding detection can be performed. As commands is send to the M5Satck-basic of the base,immediate transponder is of great importance for the microcontroller manipulator. The end effector will parse the commands and then take the target action with the aid of transponder.
Refer to MyCobot-280 for M5 Product Manual-3.4.4 Communication Forwarding Teaching for more information.
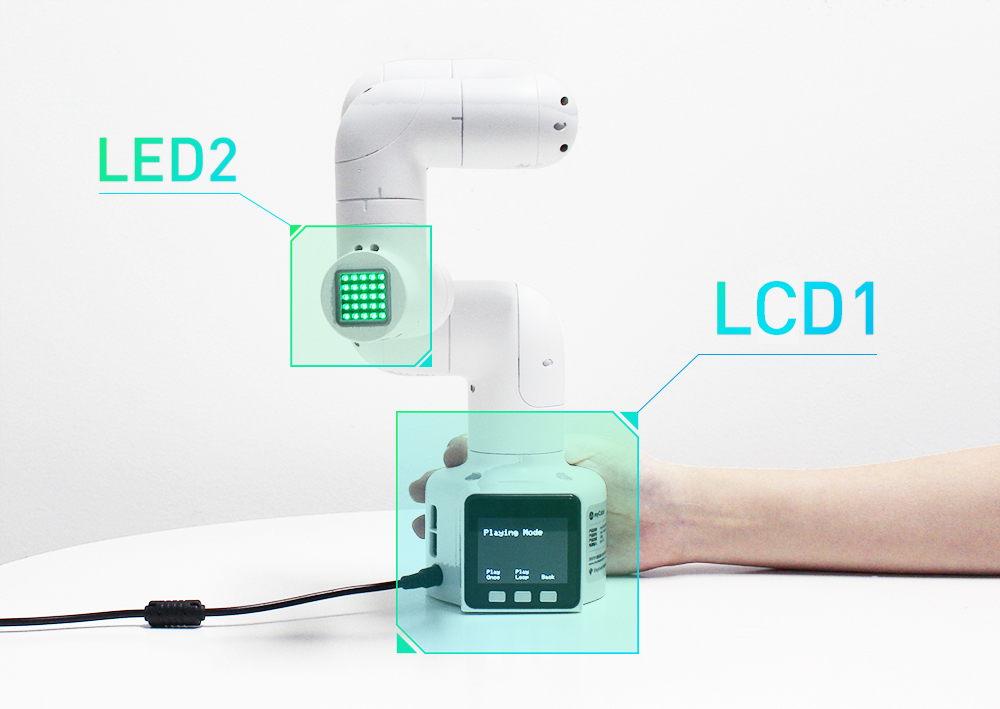
3 Robot body working status detection
For the detection of the working status of the main body, please refer to the basic function application chapter
Unboxing vedio
