Recognize Color Blocks
This case uses the eye-to-hand mode, uses the camera, combines Python+OpenCV, performs color positioning through OpenCV, and frames the color blocks that meet the situation, and calculates the relative position of the blocks through the relevant points. at the spatial coordinate position of the manipulator. Set up a set of related actions for the robotic arm, and place them in different areas according to the color of the identified objects.
1 Camera Adjustment
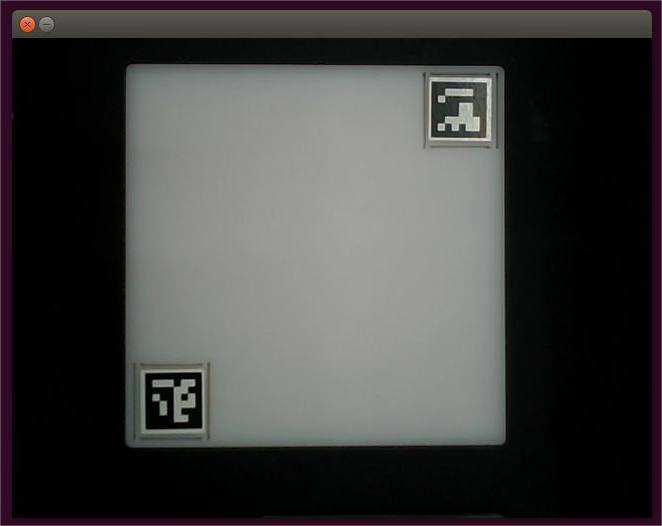
First, you need to use python to run OpenVideo.py under the aikit_V2 package. If the enabled camera is a computer camera, cap_num needs to be modified. For details, please refer to: Precautions. Make sure that the camera completely covers the entire recognition area, and the recognition area is square in the video, as shown in the figure below. If the recognition area does not meet the requirements in the video, the camera position needs to be adjusted.
M5 version:
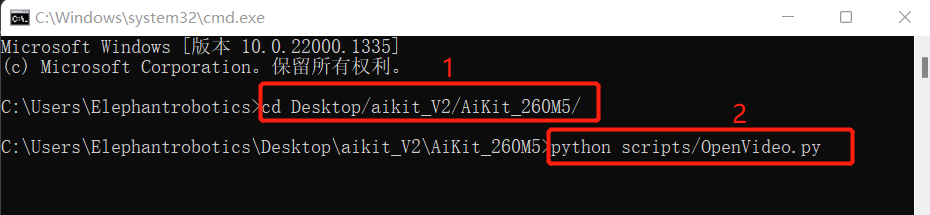
- Open a command prompt terminal (shortcut Win+R, enter "cmd" to access the terminal). Switch to the directory path where "aikit_V2" is located, then enter the target folder.
cd Desktop/aikit_V2/AiKit_260M5/
- Enter the following command to open the camera for adjustment
python scripts/OpenVideo.py
Raspberry Pi version:
- Open a console terminal (shortcut key Ctrl+Alt+T), enter the following command to enter the target folder:
cd ~/aikit_V2/AiKit_260PI/
- Enter the following command to open the camera for adjustment
python scripts/OpenVideo.py
2 Case Reproduction
M5 version:
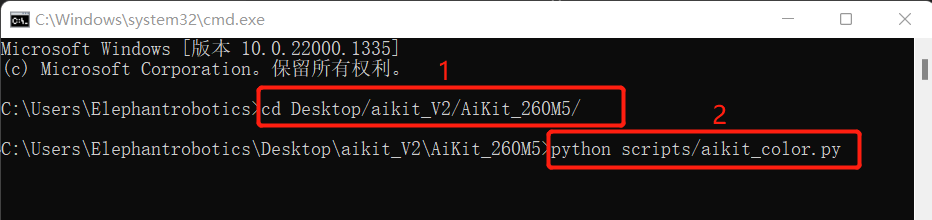
- Open a console terminal (shortcut key Win+R, enter cmd to enter the terminal), enter the following command to enter the target folder:
cd Desktop/aikit_V2/AiKit_260M5/
- Then enter the following command to start the color recognition program.
python scripts/aikit_color.py
Raspberry Pi version:
- Open a console terminal (shortcut key Ctrl+Alt+T), enter the following command to enter the target folder:
cd ~/aikit_V2/AiKit_260PI/
- Then enter the following command to start the color recognition program.
python scripts/aikit_color.py
- When the command terminal shows
okand the camera window can be opened normally, it means that the program runs successfully. At this time, the identifiable objects can be placed in the recognition area for recognition and capture.
Precautions
- When the camera does not automatically frame the recognition area correctly, you need to close the program, adjust the position of the camera, and move the camera to the left or right.
- If the command terminal does not show ok, and the color cannot be recognized, you need to move the camera slightly backward or forward, and the program can run normally when the command terminal shows ok.
- OpenCV color recognition will be affected by the environment, and the recognition effect will be greatly reduced in a darker environment.