Development Environment Construction
1 How to build the environment
1 Arduino IDE download
Arduino IDE Download Address
2 Installed drivers
Before burning the program, M5Core host (including M5Stack-basic/GRAY/M5GO/FIRE/FACES) / micro control types of equipment users according to the operating system you are using, please download the corresponding driver package. After decompressing the package, select the installation package of the corresponding OPERATING system bit.
For Mac OS, ensure correct settings of the system Preferred settings --> Security and privacy --> General before installation, and allow the user to get it from App Store or an approved developer.
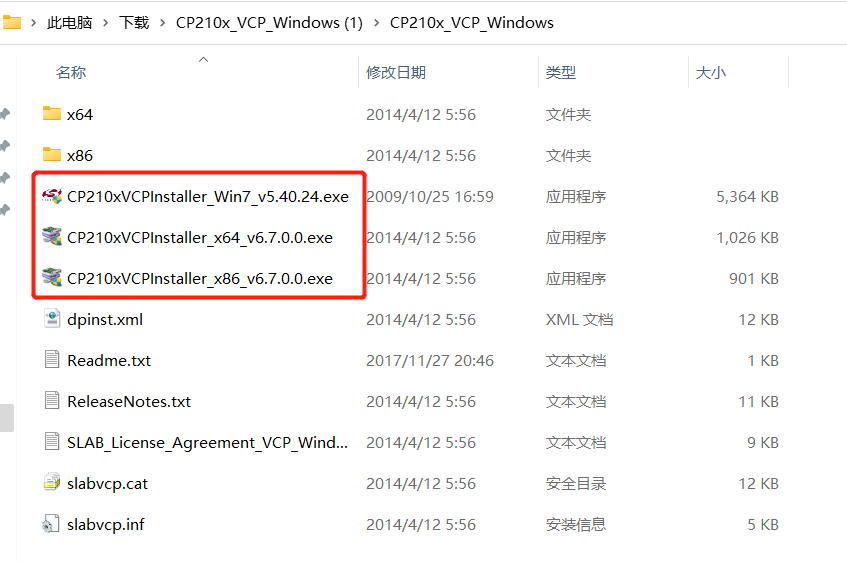
Download the M5Stack-basic serial port driver CP210X or CP34X
CP210X
After extracting the zip package, select the corresponding installation package to install according to your computer operating system (win10 and win11 select x64 or x86 for installation).
CP34X
3 Add board
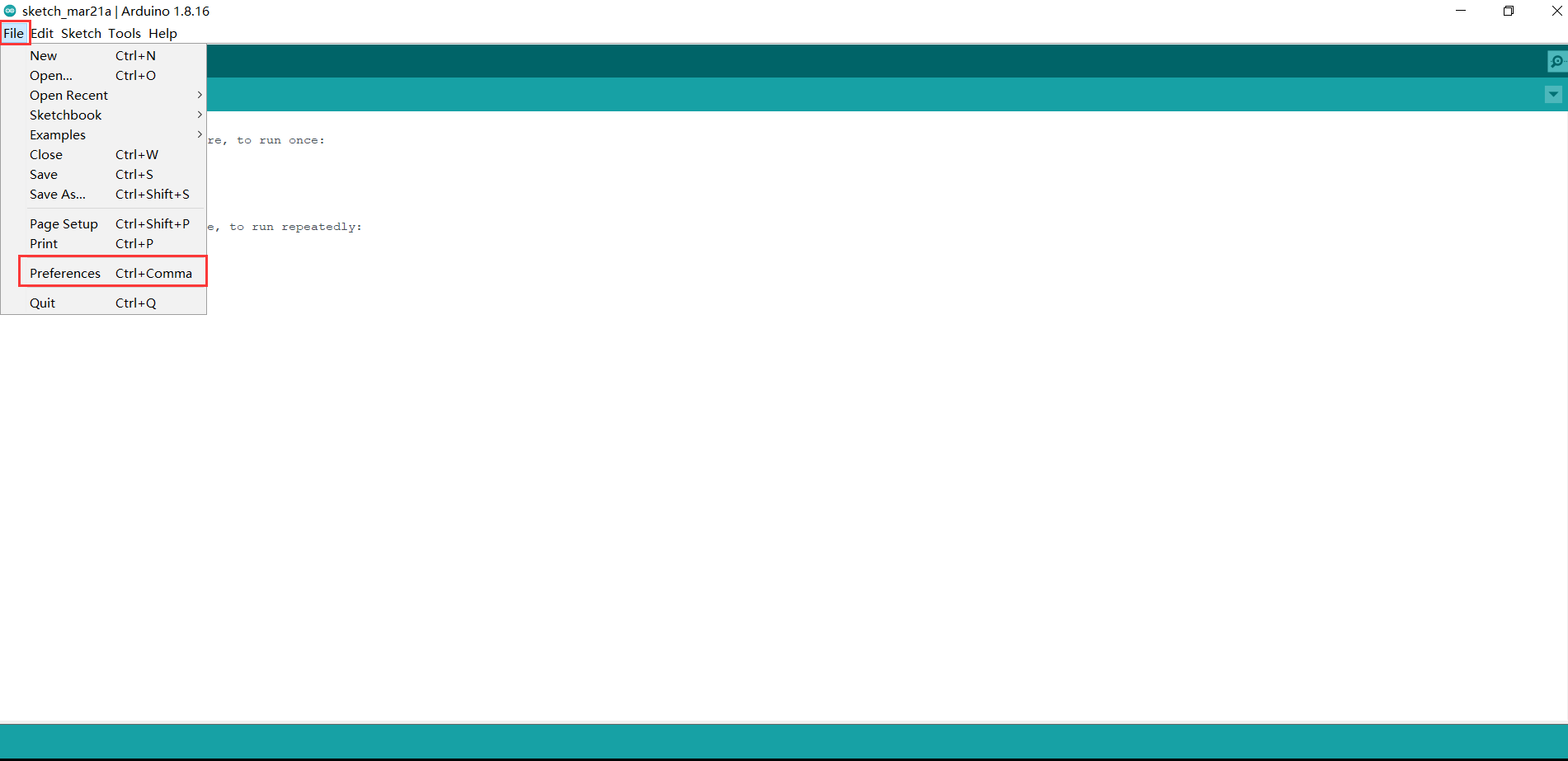
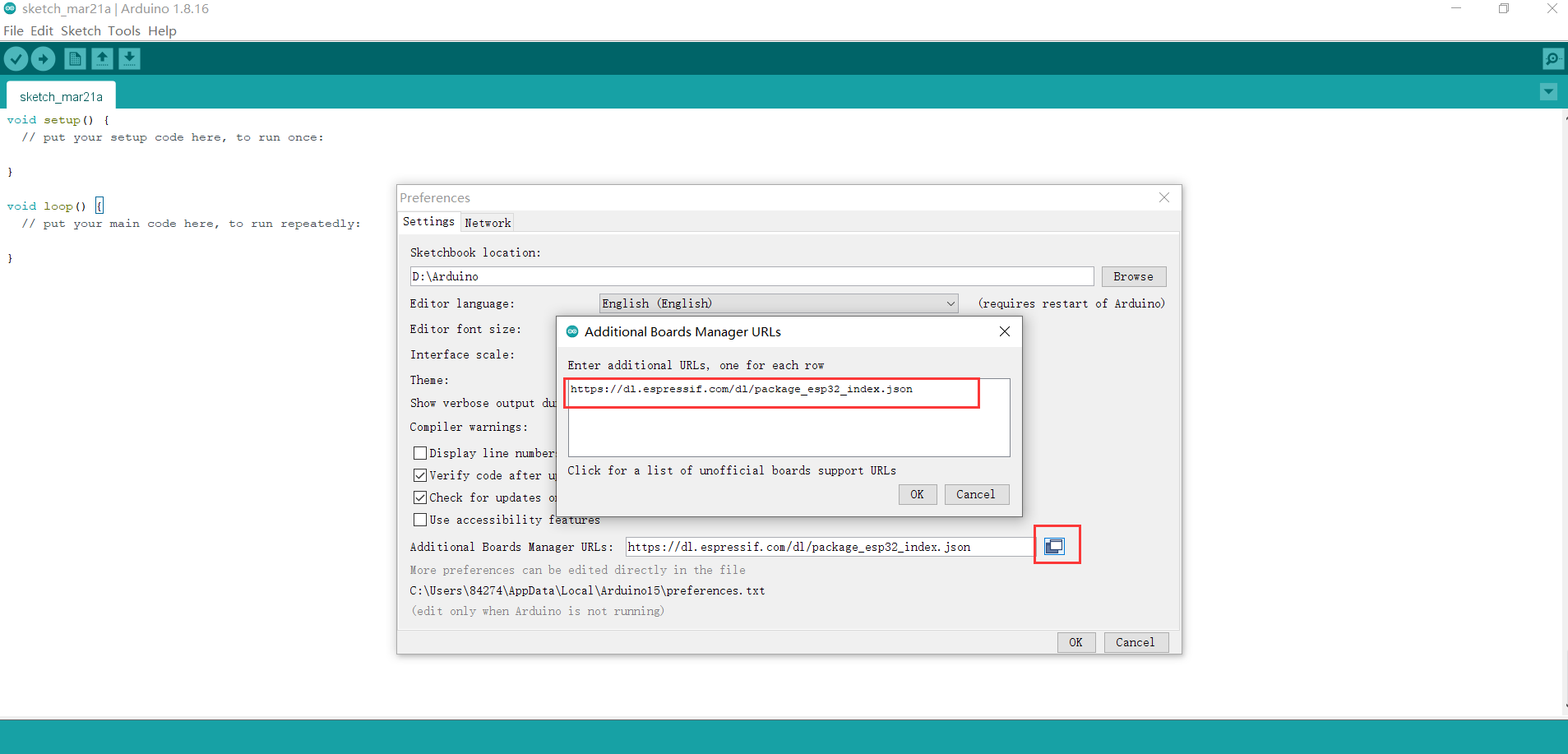
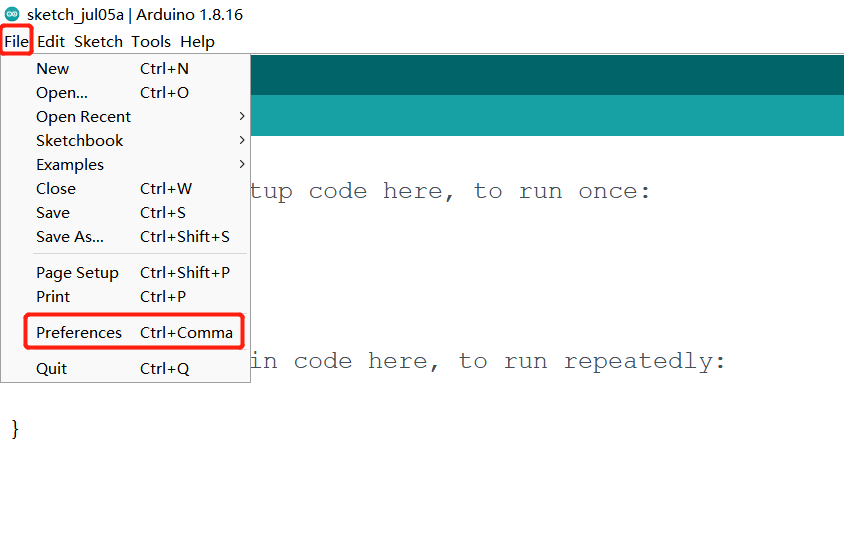
Open the Arduino IDE and select File --> Preferences --> Settings to add the url address below to the additional board manager:
https://m5stack.oss-cn-shenzhen.aliyuncs.com/resource/arduino/package_m5stack_index.json
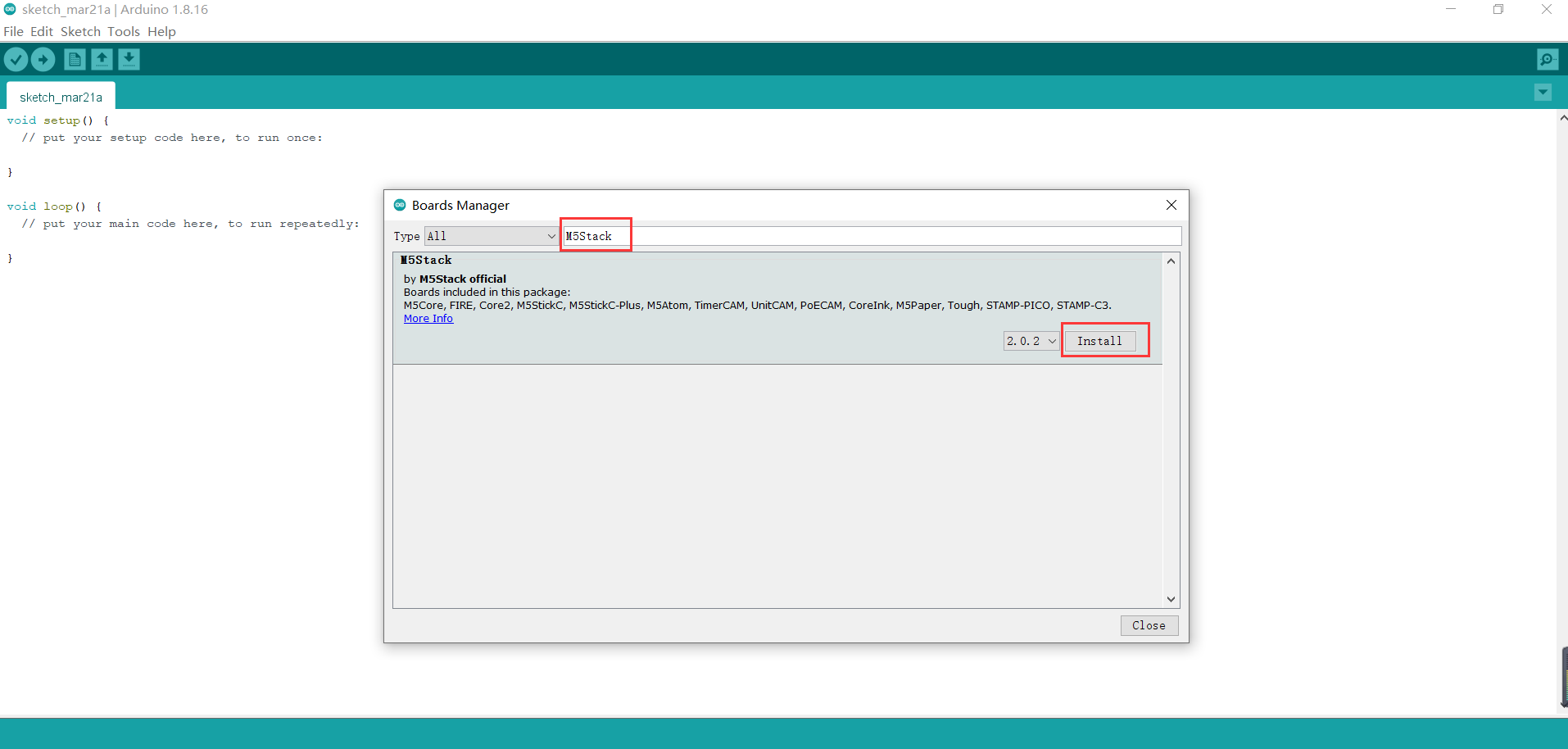
- After adding, select the Tools --> Board --> Boards Manager, in the new pop-up dialog, input and search M5Stack , click Install (in case of search failure, you can try to restart Arduino program), as shown below:
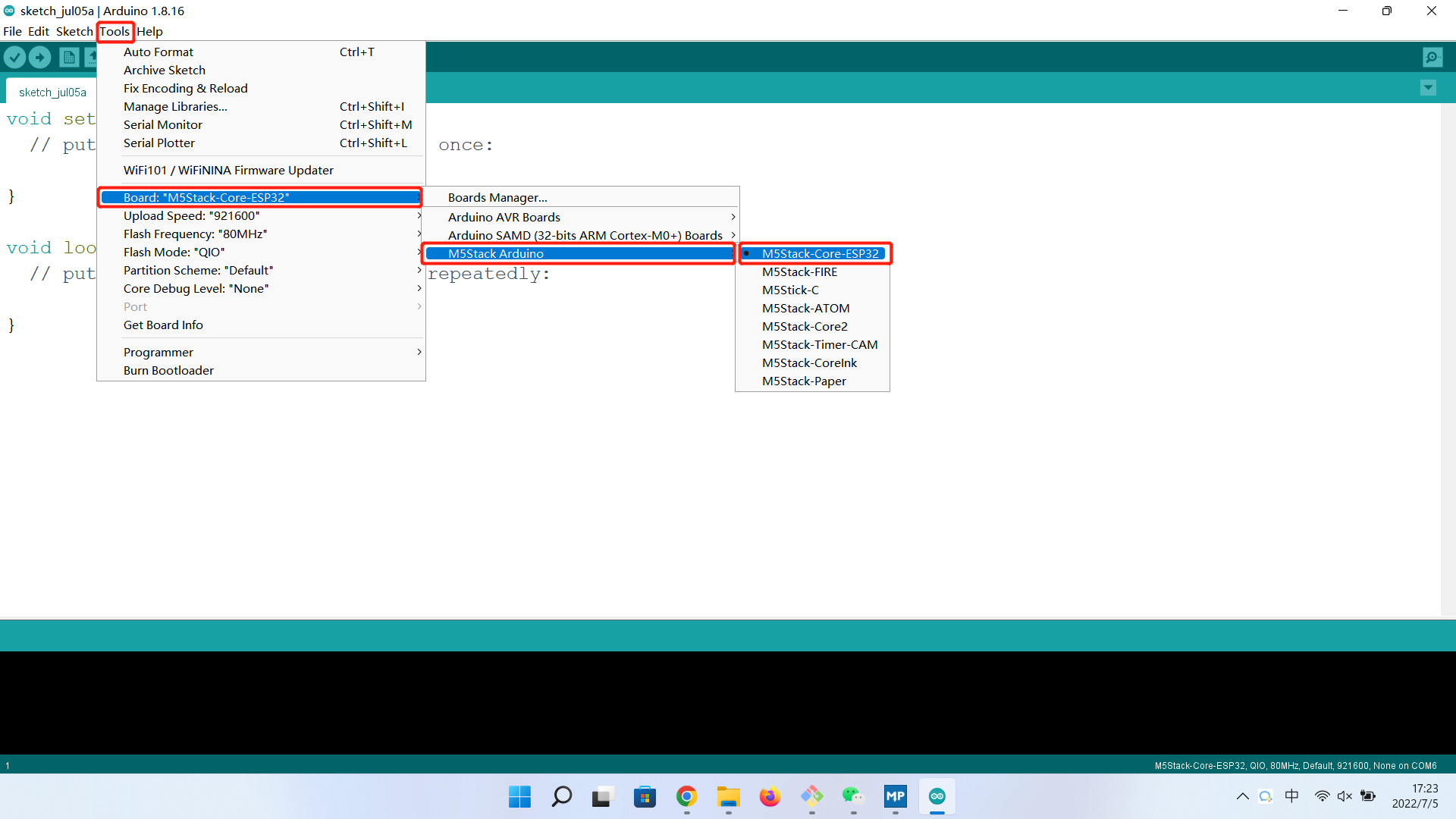
- After adding, select Tools --> Board, check whether it is successful, as shown below:
4 Add related libraries
Note: Different devices add different device-related libraries.
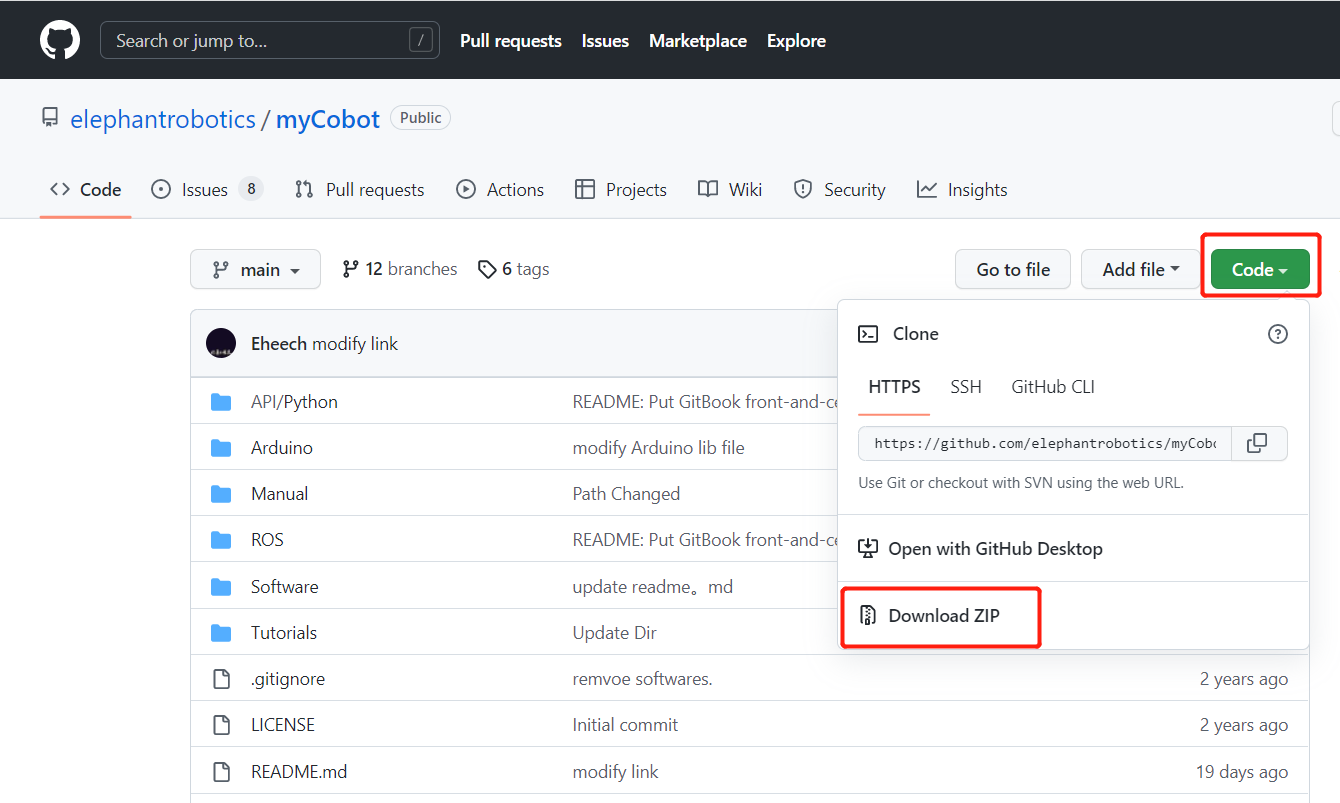
Click to download the dependent libraries
myCobot 280-Arduino :MycobotBasic.zip( After importing, you can refer to 10.3-arduinolib_use for use )
Compile the required libraries for the myCobotbasic project :MycobotBasiclib.zip (All devices need to be installed! Unzip all the contents of the package into the corresponding folder libraries, refer to the installation instructions of the dependency library)
Library Installation Instructions
First check the location of the Arduino project folder by clicking File --> Preferences (you can copy the path to your hard drive to find the libraries folder)
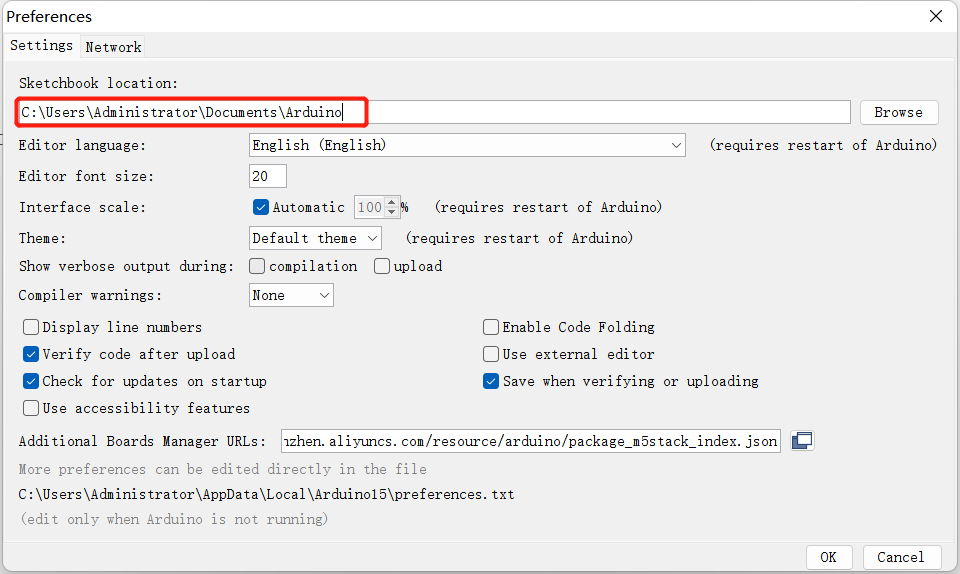
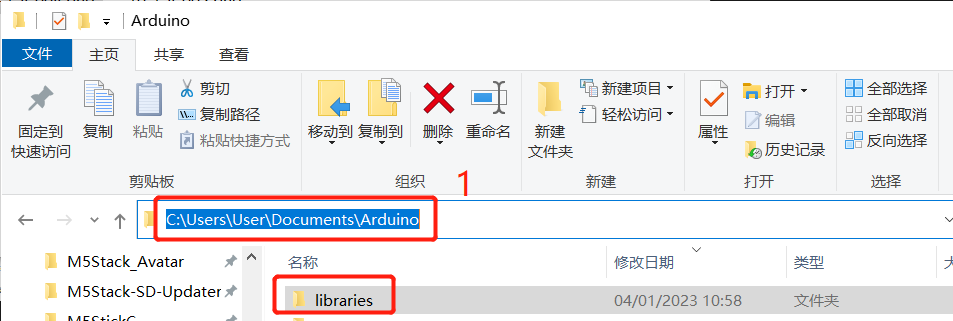
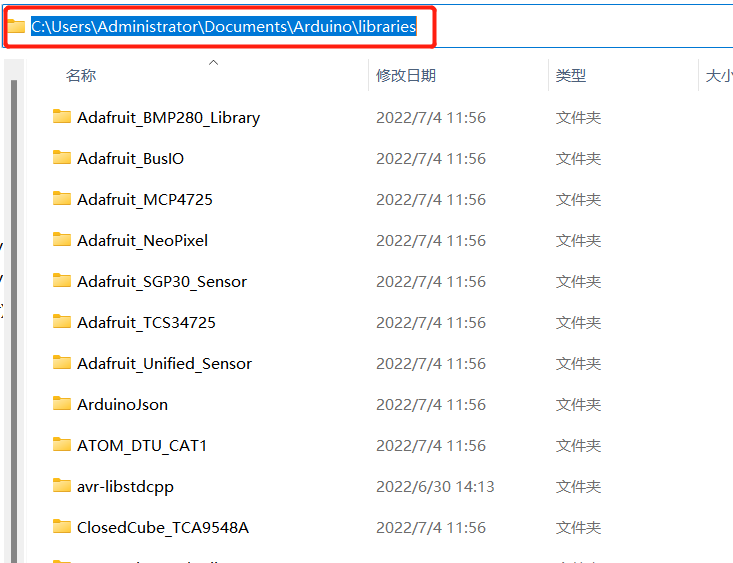
1 Copy the path here and press enter to find the libraries folder
Unzip it into the corresponding folder in the libraries directory. If you are using Arduino, don't overwrite it, just add to the existing Library.
Congratulations, you have built a Arduino related development environment.
Note: Arduino environment configuration and case compilation can be seen in our beep video ( https://www.bilibili.com/video/BV1Vi4y1c7DQ/ ) .
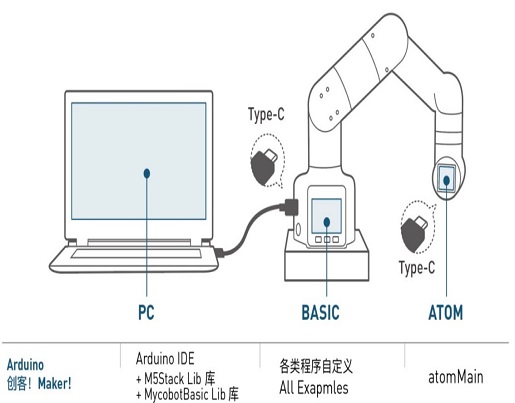
2 Development based on Arduino
Arduino is an easy-to-use, open-source electronic prototyping platform that includes hardware (various Arduino-compliant development boards) and software (Arduino IDE and related development kits). The hardware part (or development board) consists of a microcontroller (MCU), flash memory (Flash), and a set of general-purpose input/output interfaces (GPIO), etc. It can be understood as a microcomputer motherboard. The software part is mainly composed of Arduino IDE on the PC side, related board support packages (BSP) and rich third-party function libraries. Users can use Arduino IDE to easily download the BSP related to the development board and the required function library to write program.At the same time, we have an open source program MyCobotBasic on github. ControlRobot.ino and MKRBoard.ino in the case are sample programs. ControlRobot.ino can control coordinates, angles and grippers. Develop according to your own needs, such as making robots dance. MKRBoard.ino is mainly for serial communication, and can control coordinates, angles, grippers, io, etc. If necessary, it can also be modified on this basis,uno can't run MKRBoard.ino. Refer to simple use of Arduino and the API for more information.
3 Development based on Python
Our robots support Python and the development of the Python API library has become increasingly complete. The joint angle, coordinates, gripper and other aspects of the robot can be controlled via Python. Refer to installing the python environment , for more information.
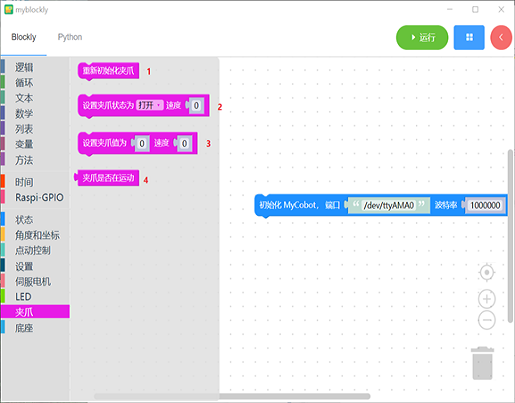
4 Development based on myBlockly
myBlockly is a fully visual modular programming software that belongs to the graphical programming language.Click here to view myblockly description
5 Development based on ROS
ROS is open-source and is a post operating system, or secondary operating system, used for robot control. With the use of ROS, the simulation control of the manipulator can be realized in the virtual environment. The robotic arm can be visualized through the rviz platform, and operate the robotic arm in a variety of ways. It can also be used to plan and execute the robotic arm's action path through to freely control the robotic arm. After installing the ROS development environment , refer to use cases and use of moveit for more information. The emergence of Ros solved the communication problem of each component of the robot. Later, more and more robot algorithms were integrated into ROS. ROS2 inherited ROS, which is more powerful and better than ROS. Compared with ROS that only supports Linux systems, ROS2 also supports windows, mac, and even RTOS platforms. After installing the ROS2 development environment , refer to ROS2 Use Cases for more information.
