Unpacking and the First-Time Use
1 Unpacking and Working Environment
Notice: Before using, check the packaging first. If there is any damage, please contact with the logistics company and the supplier in your area in time. After unpacking, please check the total items according to the item list.

Table 2-2 myCobot Robot Arm [Standardized Set]
| Items[Standard Set] | -Robot arm (myCobot 320 model Pi ) -Product Manual -Matched Power -USB-Type C -Jumper -Pedestal |
|---|---|
Operate the robot only for applications that meet the conditions listed in the table below.
Table 2-3 Working Environment and Conditions
| Working environment | Condition |
|---|---|
| Temperature | 0°C~45°C |
| Relative Humidity | 20%~70% |
| Space Requirements | Indoor |
| Other Environmental Requirements | -Avoid sunlight exposure. -Avoid dust, oil fume, salt, iron filings, water etc. -Avoid flammable and corrosive liquids and gases. -Do not transmit shock and vibration etc. -Avoid strong electromagnetic interference sources. |
2 Installation Requirements
myCobot weights 3.3 kg. Due to the fact that the center of gravity will change along with the movement of the robot during utilization, robot is required to be fixed on a solid base at the beginning. A fixed base, or mobile base are both acceptable.
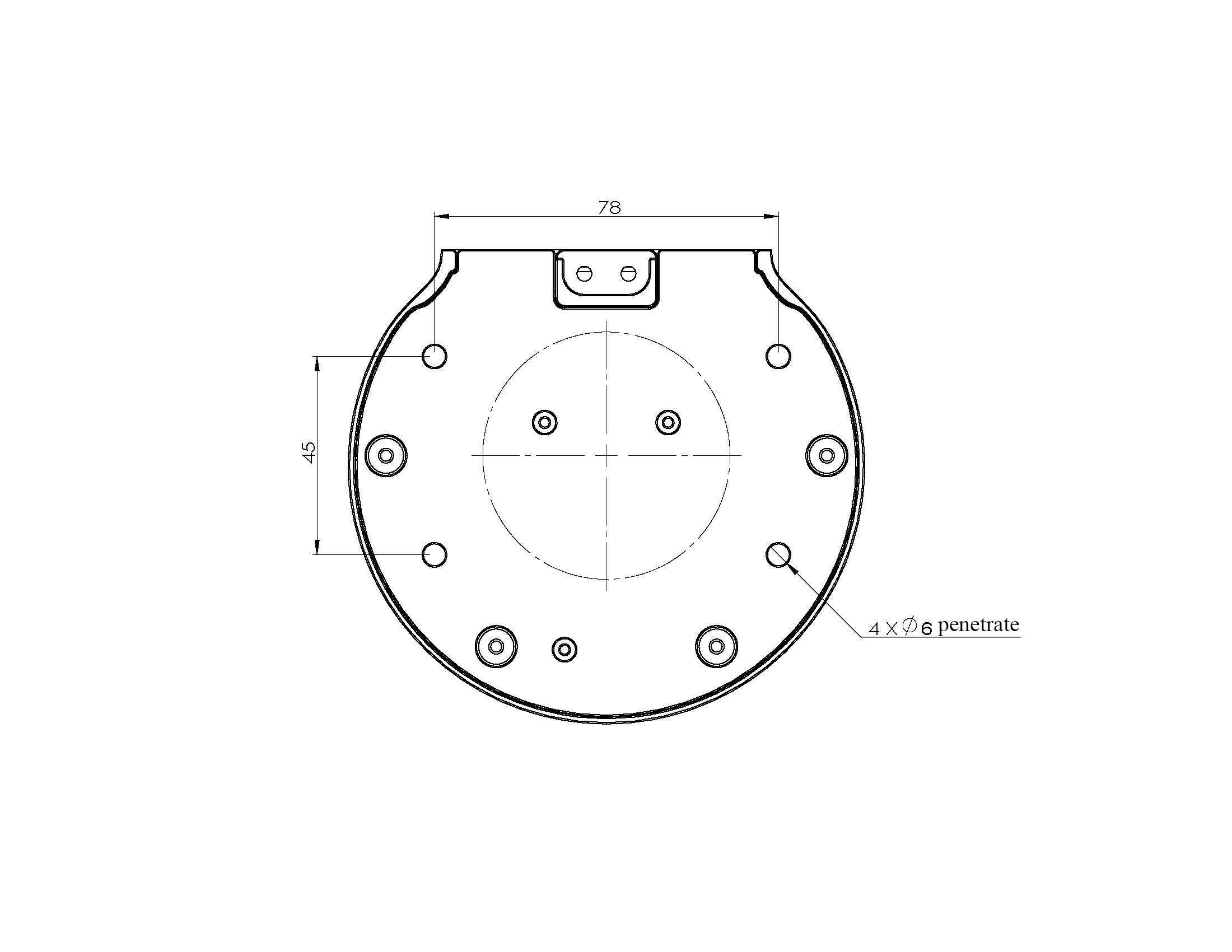
Base Interface Size
- The base fixing holes act as the interface between robot and other bases or planes. The specific hole size is shown in the figure below. There are 4 countersunk holes with a diameter of 4.5 mm, which can be fixed with M6 bolts.
- The end is mounted with flange and is compatible with both LEGO component holes and screw threaded holes. Please make sure that there are corresponding threaded holes on the fixed base before installing.
Before the installation, please confirm:
- The environmental condition meets the requirements listed in Section 2.2.4.3.1 above.
- The installation position is no smaller than the working range of the robot, and there is enough space for installation, use, maintenance and repair.
Put the base in a suitable position.
Installation-related tools are prepared, such as screws, wrenches, etc.
After confirming the above, please move the robot to the base installation table, adjust the robot position, and align the fixing holes of the robot base with the holes on the base mounting table. After aligning the holes, align the screws with the holes and tighten them.
Notice: When adjusting the position of the robot on the base installation table, do not pushing or pulling the robot directly on the base installation table to avoid scratches. When manually moving the robot, do not applying external force to the fragile parts of the robot body, so as to avoid unnecessary damage to the robot.
For more installation details, scan the code to watch the video:

3 Power on the Robot
Before operation, confirm that you have read Chapter 1 Safety Instructions to ensure safe operation. At the same time, connect the power adapter with the robotic arm, and fix the base of the robotic arm on the table. The connection method is shown in Figure 3-1.

Figure 3-1 Location of the power connector
myCobot must be powered on with an external power supply to provide sufficient power:
- Rated voltage: 24V
- Rated current: 9.4A
- Plug Type: KPPX-4P R7BFDC
Note that when using, please connect the 320 adapter first, and then connect to the typeC. You cannot just use the TypeC plugged into the M5Stack-basic for power supply. Please use the official power supply to avoid damage to the robotic arm.
4 Driver Installation
The Raspberry Pi version of the robotic arm has a built-in software driver package, which can be used after booting without tedious installation steps.
5 Connecting to PC via USB
The Raspberry Pi version of the robotic arm has a built-in UBUNTU system, so there is no need to connect to other computers.
6 Use of end tools
6.1 Adaptive Gripper
Details: 5 Adaptive gripper
Adaptive gripper installation video to be added...
6.2 Module Sucking Cups
Details: 7 Module suction cup
The installation video of the module suction cup is to be added...
6.3 Electric Gripper
Details: 8 Electric Gripper
The installation video of the electric gripper is to be added...
6.4 Pneumatic Gripper
Details: 9 Pneumatic gripper
Pneumatic gripper installation video to be added...