Development Environment Construction
1 Use environment
myCobot 320 for Raspberry Pi version comes with Ubantu (V-18.04) system, built-in Python, myStudio, myBlockly, ROS, OpenCV and driver libraries, so there is no need to download development software and install development environment (additional Python libraries need to be installed depending on your needs). A monitor to connect the robotic arm is the only requirement for preparation.
2 Development Environment
myCobot 320 Raspberry Pi has a built-in development environment, which can be used directly. The followings are the development environments supported by the myCobot 320 for Raspberry Pi version.
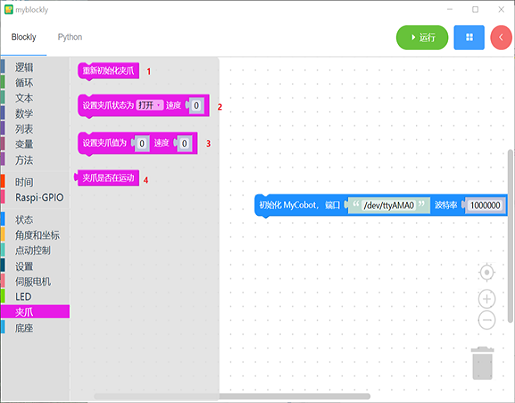
- 2.1 Development based on myBlocklymyBlockly and UIFlow, which are both graphical programming software and visualization tools. Users can create programs dragging modules, the process of which is very similar to building blocks. After installing myblockly and UIFlow , refer to myblockly use cases and UIFlow use cases .
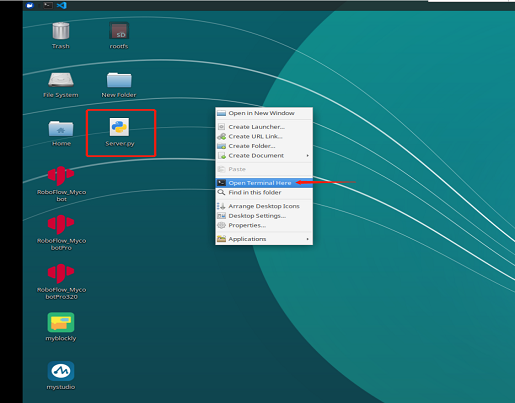
- 2.2 Development based on Python. Our robots support Python and the development of the Python API library has become increasingly complete. The joint angle, coordinates, gripper and other aspects of the robot can be controlled via Python. Refer to installing the python environment , for more information.
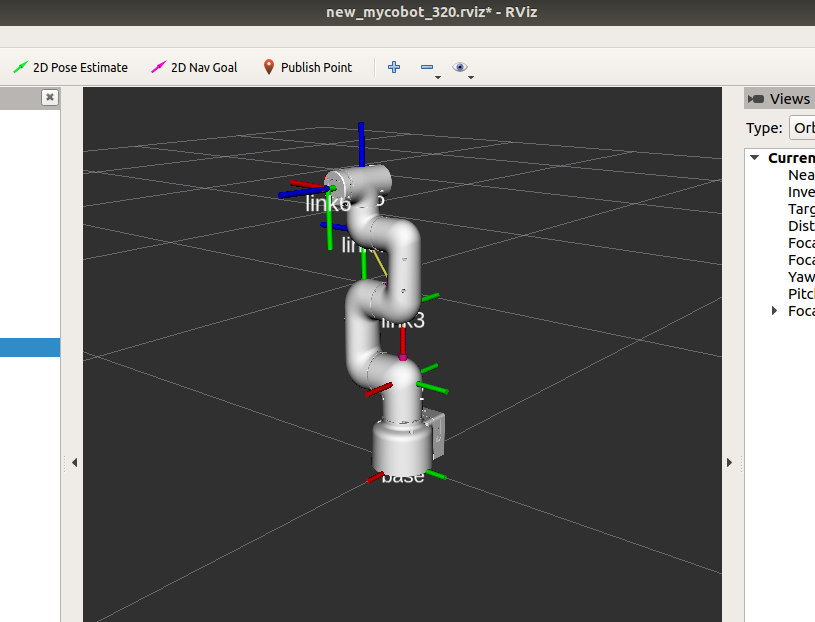
- 2.3 Development based on ROS. ROS is open-source and is a post operating system, or secondary operating system, used for robot control. With the use of ROS, the simulation control of the manipulator can be realized in the virtual environment. The robotic arm can be visualized through the rviz platform, and operate the robotic arm in a variety of ways. It can also be used to plan and execute the robotic arm's action path through to freely control the robotic arm. After installing the ROS development environment , refer to use cases and use of moveit for more information.
3 Firmware update
myCobot 320 for Raspberry Pi has built-in myStudio, which can be used directly.