mechArm-270 M5

1 Structural parameters
1.1 Robot arm parameters
| index | parameter |
|---|---|
| Name | Elephant small six-axis robotic arm |
| Model | mechArm-270 M5 |
| Degree of freedom | 6 |
| Repeated Positioning Accuracy | ±0.5 mm |
| Load | 250g |
| Dead weight | 1kg |
| Effective working radius | 270mm |
| Power input | 8~12V 5A |
| Motor type | High-precision magnetic encoder motor * six |
| Movement maximum speed | 120°/s |
| control | M5Stack-basic |
| communication | USB / Type-C |
1.2 Scope of work

1.3 Range of motion of joints
| joint | scope |
|---|---|
| J1 | -160 ~ +160 |
| J2 | -85 ~ +90 |
| J3 | -180 ~ +45 |
| J4 | -160 ~ +160 |
| J5 | -100 ~ +100 |
| J6 | -∞ ~ +∞ |
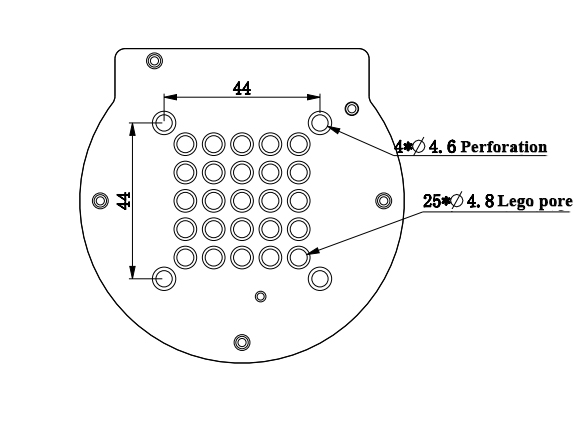
1.4 Hole installation
Hole installation
The base is compatible with both LEGO parts installation and M4 screw installation.
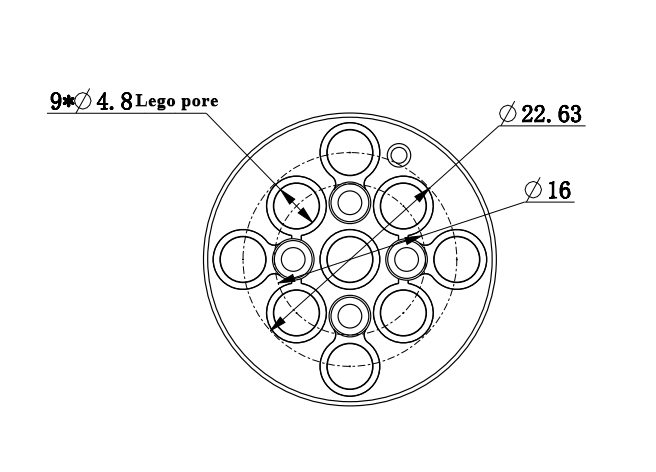
Robot end mounting flange
end of the arm is compatible with both LEGO component holes and screw threaded holes.
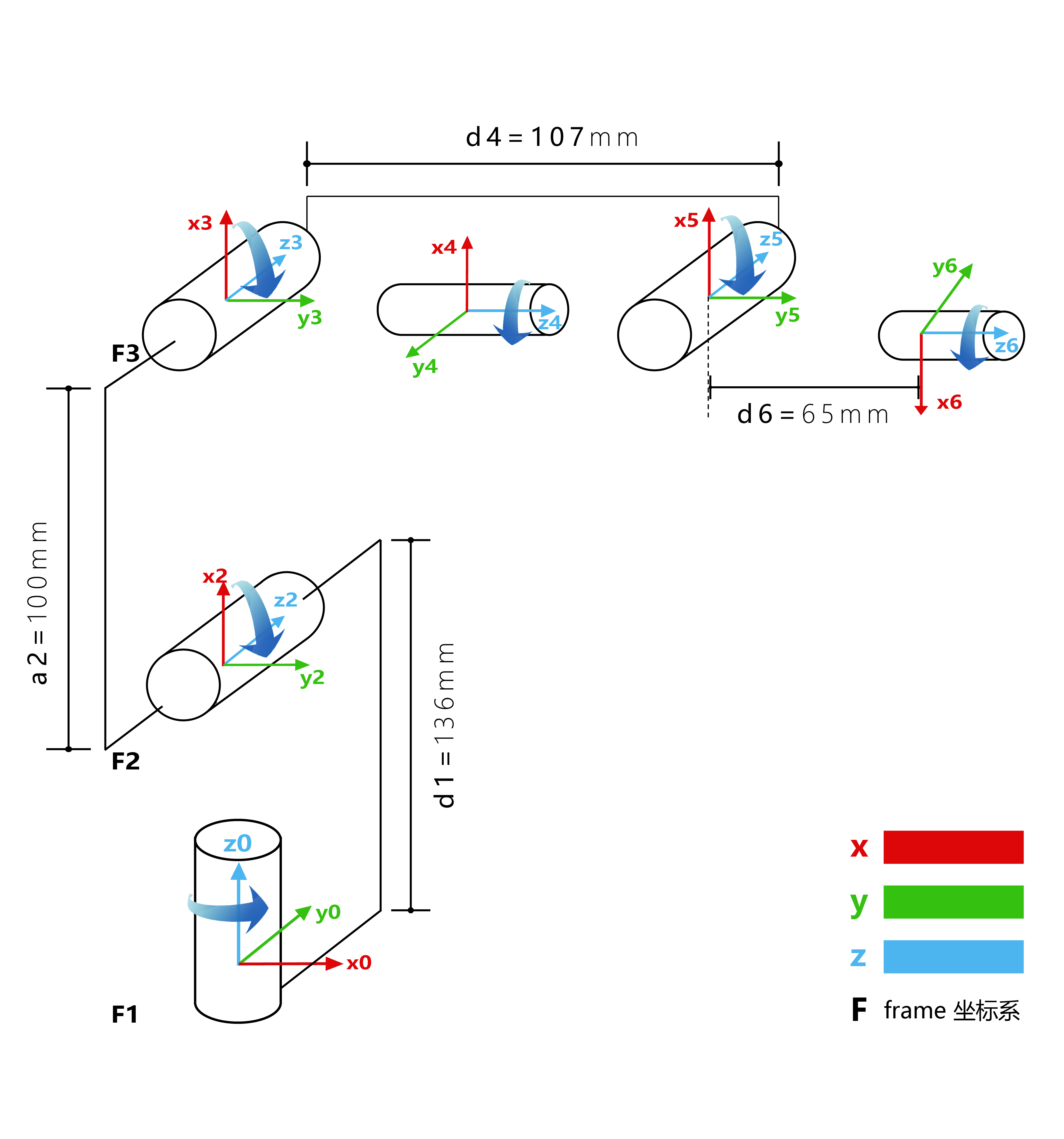
1.5 DH parameters