上电与初步检测
1 机器人上电
操作前,请确认已阅读并确保已遵循第一章 安全须知的内容,确保操作安全。同时将电源适配器连接上机械臂,并将机械臂底座固定在桌子上。连接方式如图 3-1 所示:
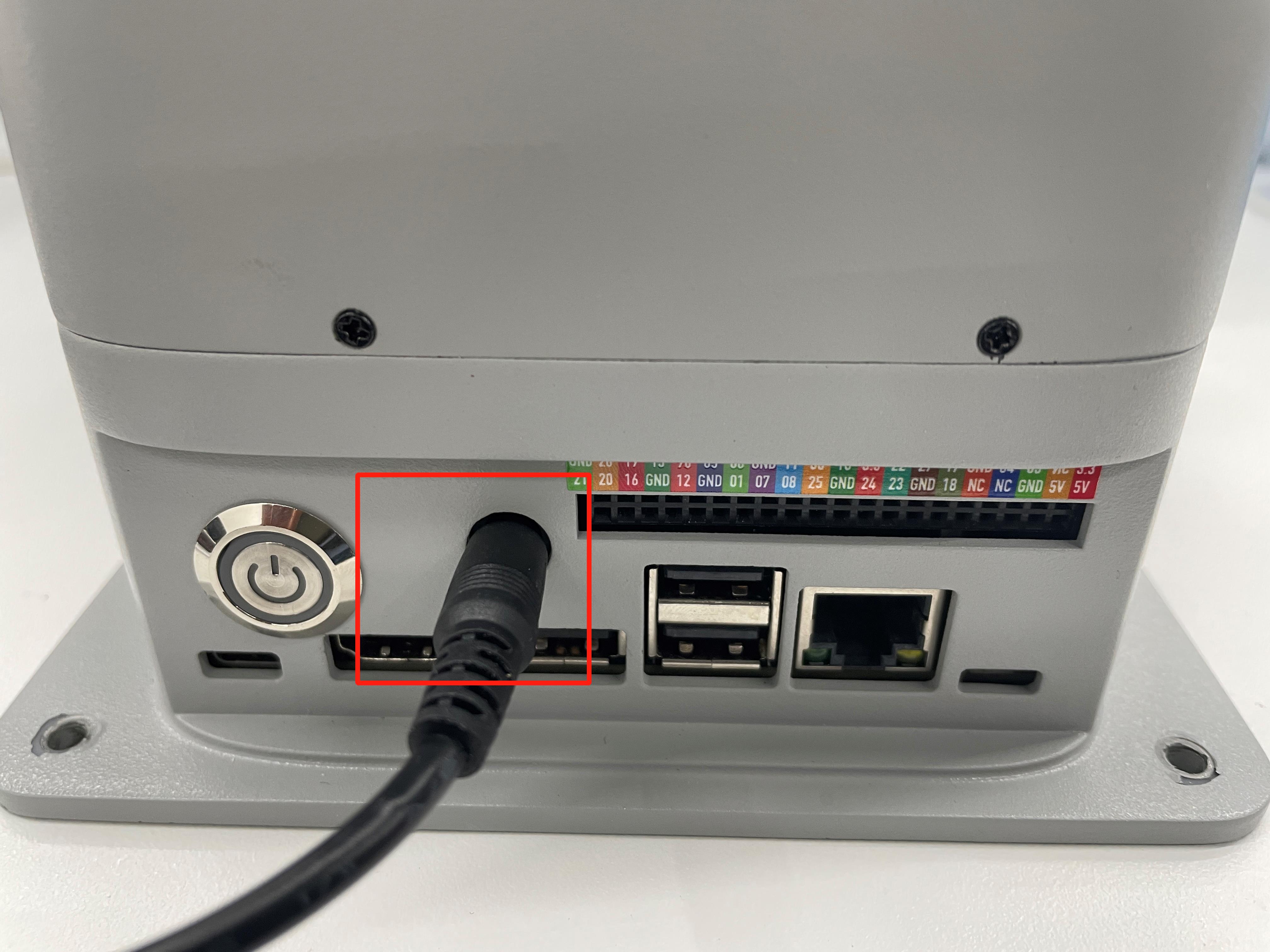
图 3-1
myCobot 必须使用外部电源进行供电,以提供足够的电量:
- 额定电压: 12V
- 额定电流: 3-5A
- 插头类型: DC 5.5mm x 2.1
注意,不能仅仅使用插入M5Stack-basic的TypeC进行供电。使用官方适配的电源,以免对机械臂造成损害。
2 连接外部设备
使用配套的HDMI线连接机械臂和显示器:
先将HDMI线插入显示器的HDMI接口。
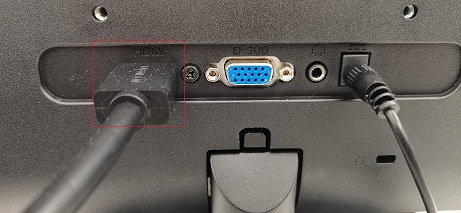
再将另一头插入机械臂的HDMI接口即可。

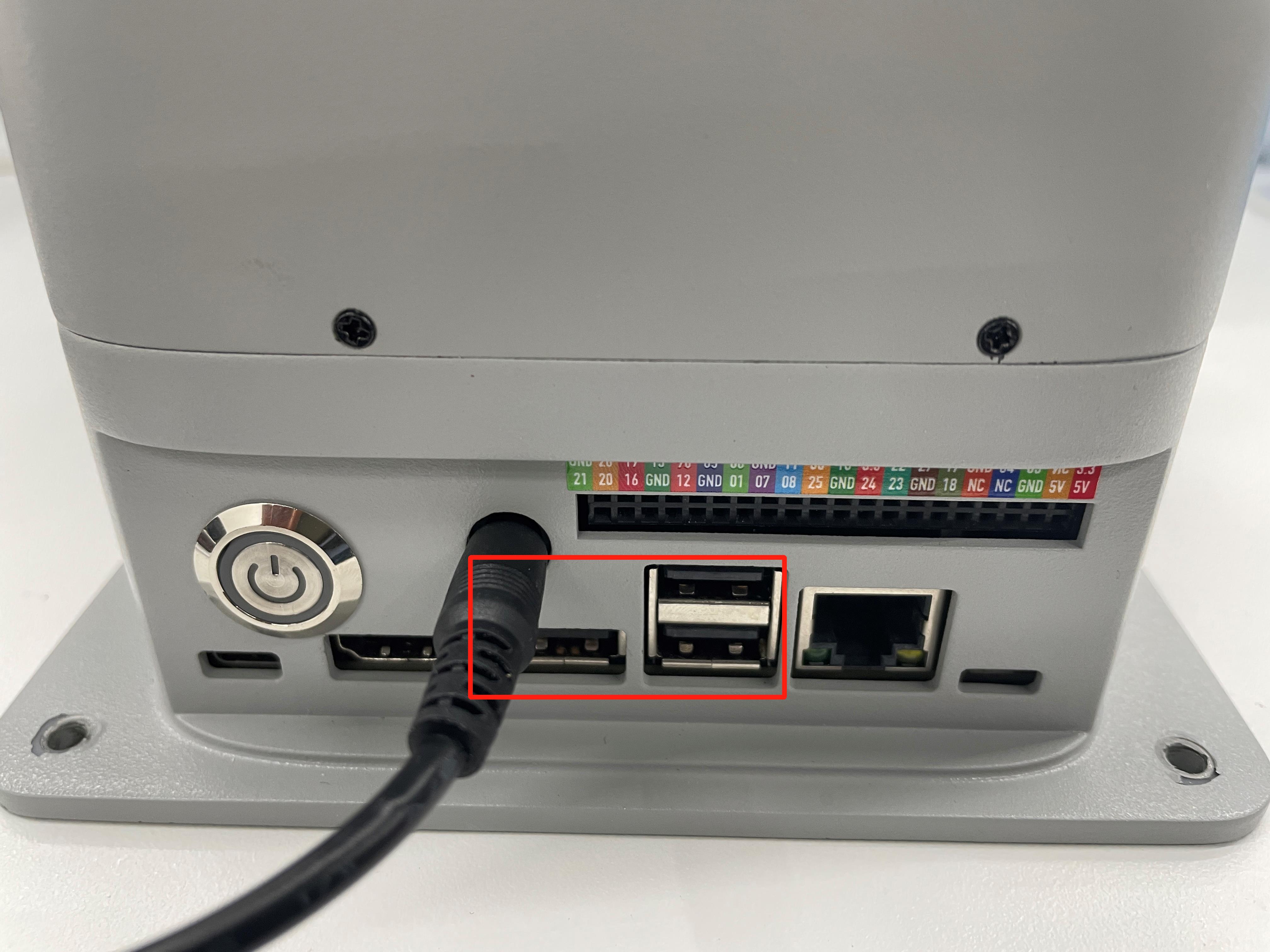
myCobot 280 Jetson Nano 有3路USB接口,这可以直接插入鼠标、键盘和其他外围设备使用
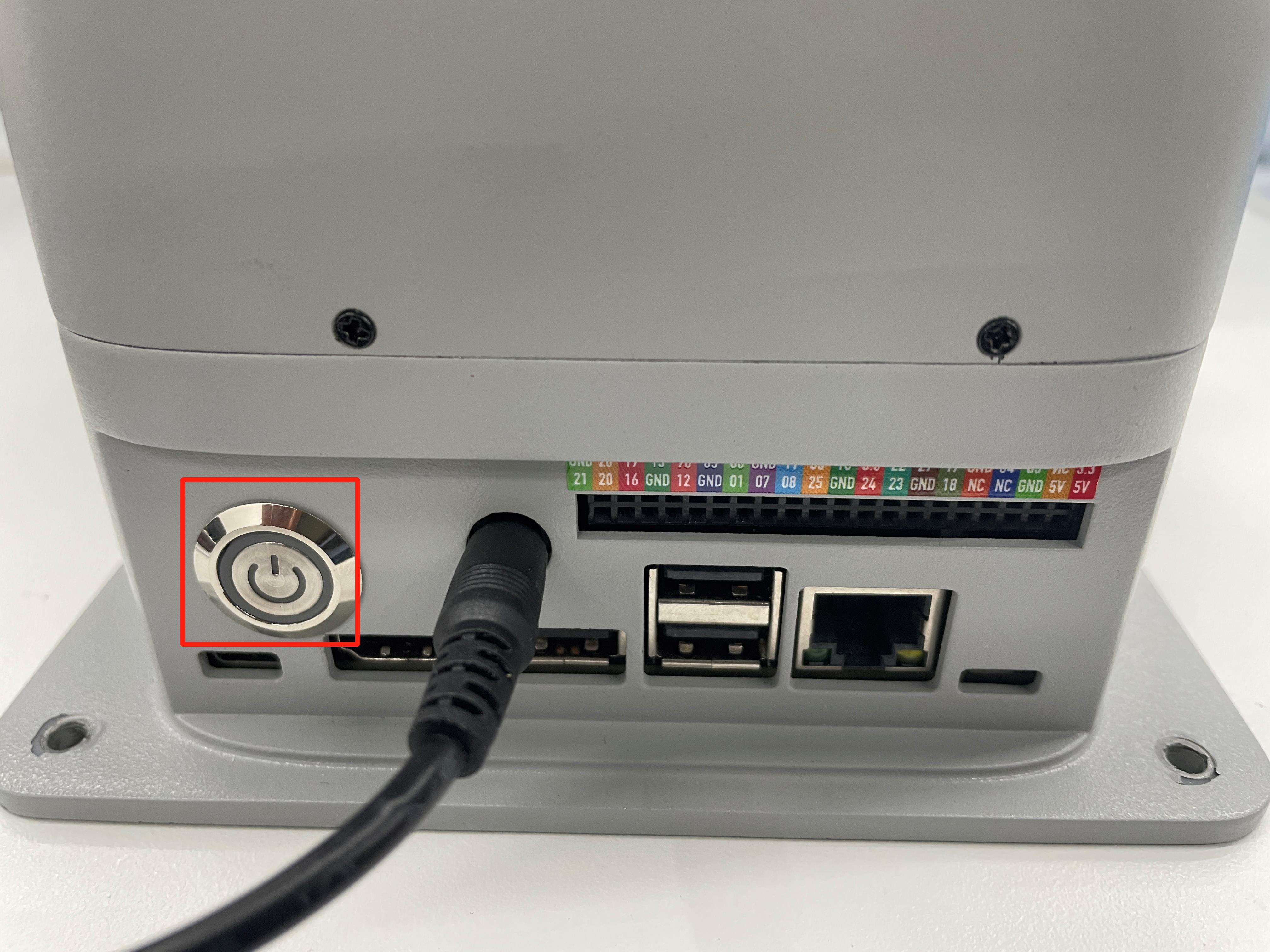
3 上电
连接所需的外部设备后,按下按钮如图圈来启动机器