开发环境与建设
1 Ubuntu Mate 20.04系统简介
什么是Ubuntu
Ubuntu是个人桌面操作系统中使用最广泛的linux操作系统。对于初学者来说,熟悉linux环境或一些嵌入式硬件操作系统是一个很好的选择。ubuntu官方网站还发布了树莓派专用操作系统。

1.1 系统基本功能介绍
1.1.1 系统与正式发布版本的区别
与官方版本相比,我们做了以下改变:
- 集成python/Ros1/Ros2和其他环境,用户可以直接使用我们公司提供的内置软件,而无需设置其他环境
- 已经安装了我们的操作软件(myStudio、myBlockly),无需自己安装
- 系统启动后拥有自己的热点(热点名称:ElephantRobotics_AP),您可以通过远程连接工具VNC连接到系统,无需连接到显示屏
1.1.2 系统基本功能介绍
因为myCobot 280 树莓派版本具有内置的开发环境,所以下面介绍的软件可以直接使用。
1 桌面
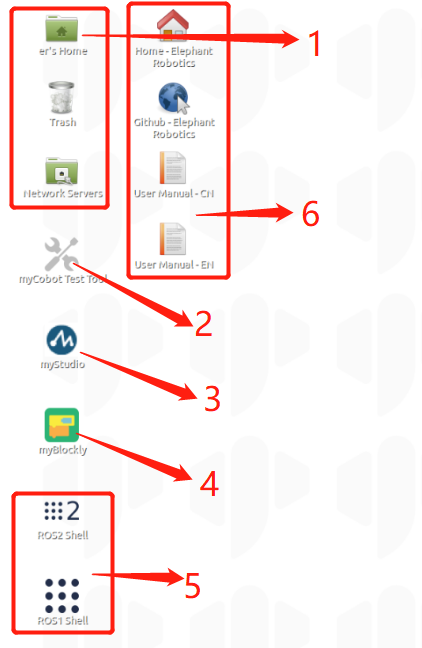
1 系统文件夹和回收站
2 测试myCobot是否正常工作的测试工具
3 myStudio: 它可以将固件烧录到机械臂上
4 myBlockly: 可视化模块化编程软件
5 Ros1/Ros2:它是一种用于编写机器人软件程序的高度灵活的软件架构。
6 browser and link:可以跳转到我们的官方网站和Gitbook (需要连接到Internet)
2 工具栏

1 终端:命令行界面
2 文件管理器 :可以查看系统的存储资源
3 Notepad:也用于打开一些脚本文件,查看代码
4 Vim:文本编辑器 有关详细信息,请查看 introduction
5 显示桌面:单击可直接显示桌面
6 用于查看CPU使用情况和内存使用情况
7 回收站: 它用于存储用户临时删除的文档,并且可以恢复回收站中存储的文件
3 内置软件
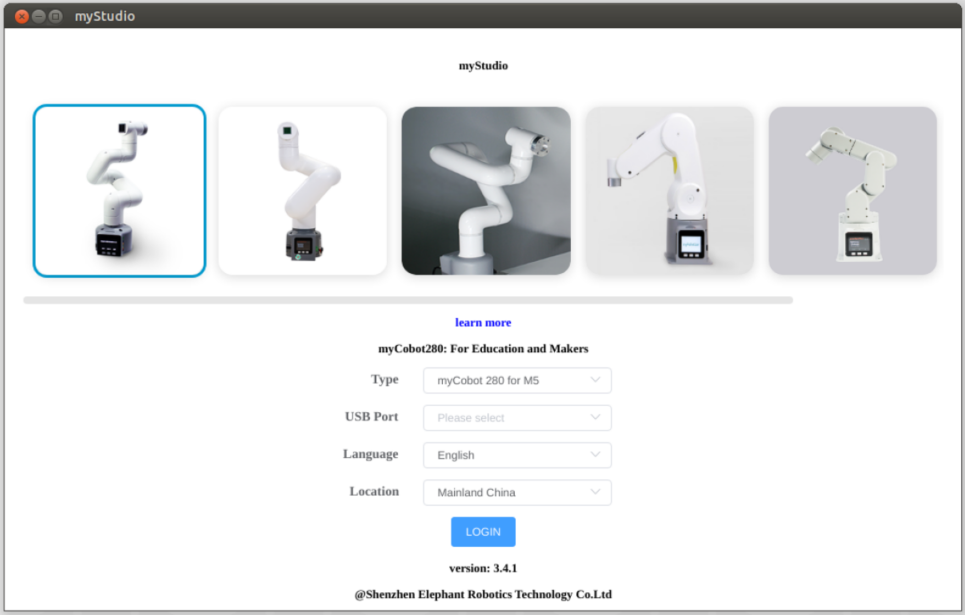
myStudio
- 烧录和更新固件
- 提供教程资料,如用户手册和教程视频
- 提供维护和维修信息
详细介绍和使用方法, 请单击此处跳转
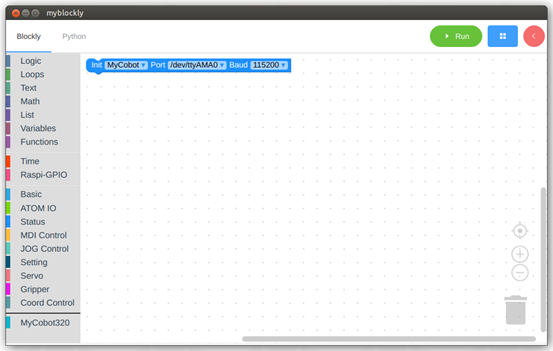
myBlockly
它是一款基于python环境和pymybot相关库的益智编程软件,允许用户以块构建方式进行编程,以控制myCobot。它适合编程学习者,可以训练他们的编程逻辑技能。myblockly还提供了一个python显示界面,它可以将用户构建的myblocky程序转换为python语言,以帮助用户学习python语句。
如果您想查看软件使用方法和案例, 单击此处跳转
4 链接网络
有线连接
机械臂打开后,默认连接到系统配置的热点: ElephantRobotics_AP_XXXX
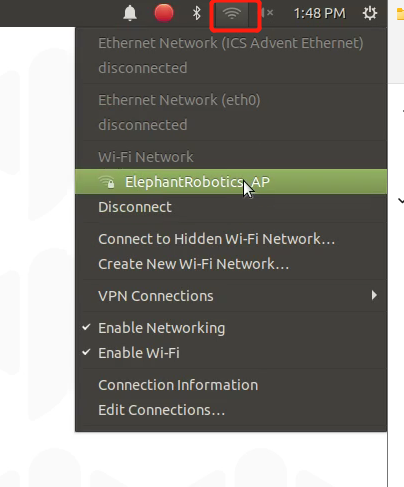
点击“Disconnect”,断开默认热点连接
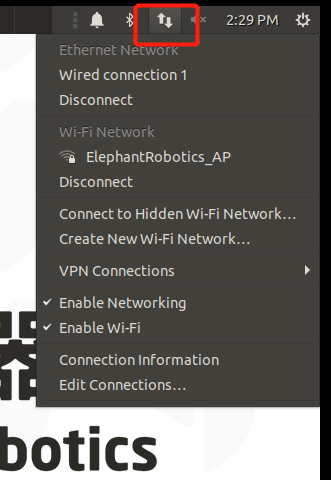
将网线连接到机械臂的网络端口

将普通互联网网线连接到机械臂的网络端口
无线连接
无线连接的方式有两种,第一种方式需要外接显示器对系统进行一些操作,具体步骤如下:
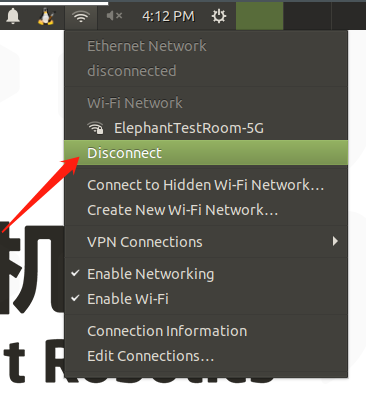
先点击 "Disconnect" 关闭默认热点
点击 "Enable Wi-Fi" , 等待显示当前可用的WiFi
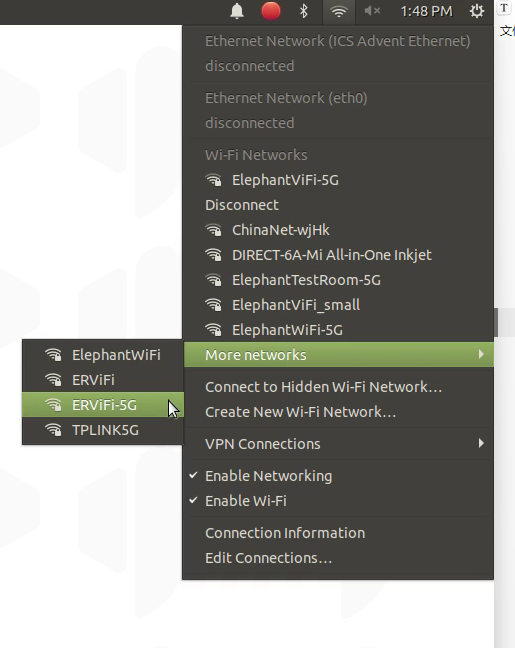
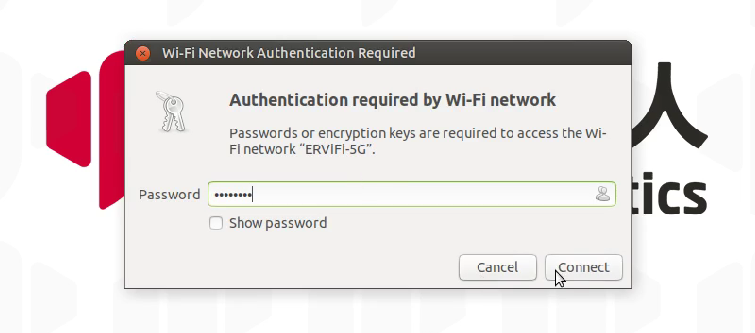
单击需要连接的WiFi,输入WiFi密码
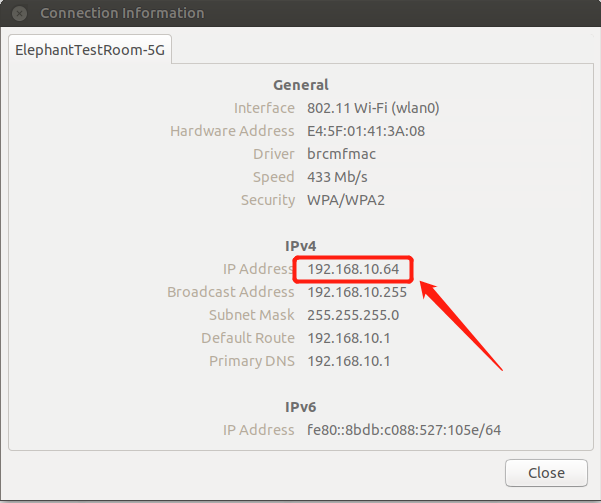
连接成功后,点击"Connection Information",查询机械臂当前IP地址

如示例所示,“192.168.10.64”即为机械臂当前IP地址
将您的电脑和机械臂的WiFi连接到同一个WiFi下,打开VNC viewer软件,输入这个IP地址(以上方的案例举例则为输入192.168.10.64)然后回车,密码是Elephant,用户名默认是不填的,成功连接示例如下:

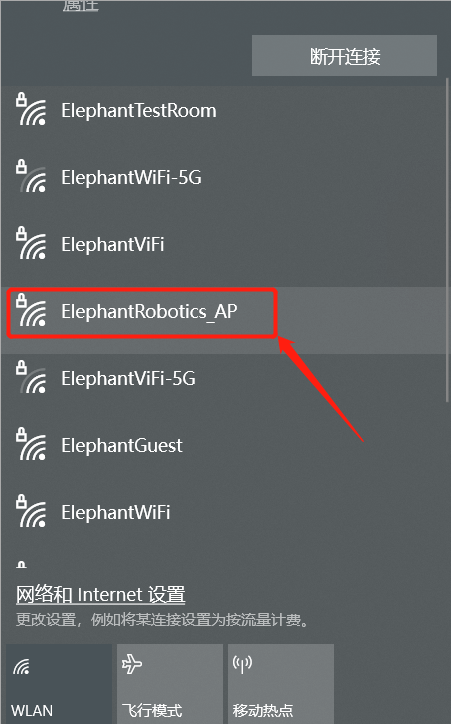
第二种方式不需要连接显示屏,直接用PC连接Ubuntu系统热点进行远程控制,但是此连接方式并不具备网络冲浪的功能,只能远程操控机械臂系统,具体步骤如下:
PC选择连接Ubuntu系统热点ElephantRobotics_AP_XXXX,输入密码Elephant
打开VNC viewer软件,输入这个IP地址 10.42.0.1 ,然后回车,密码是Elephant,用户名默认是不填的,成功连接示例如下:

1.2 系统中包含的开发环境介绍
1 Ros1/Ros2
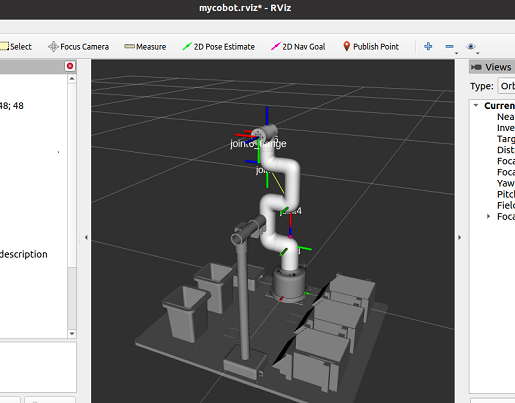
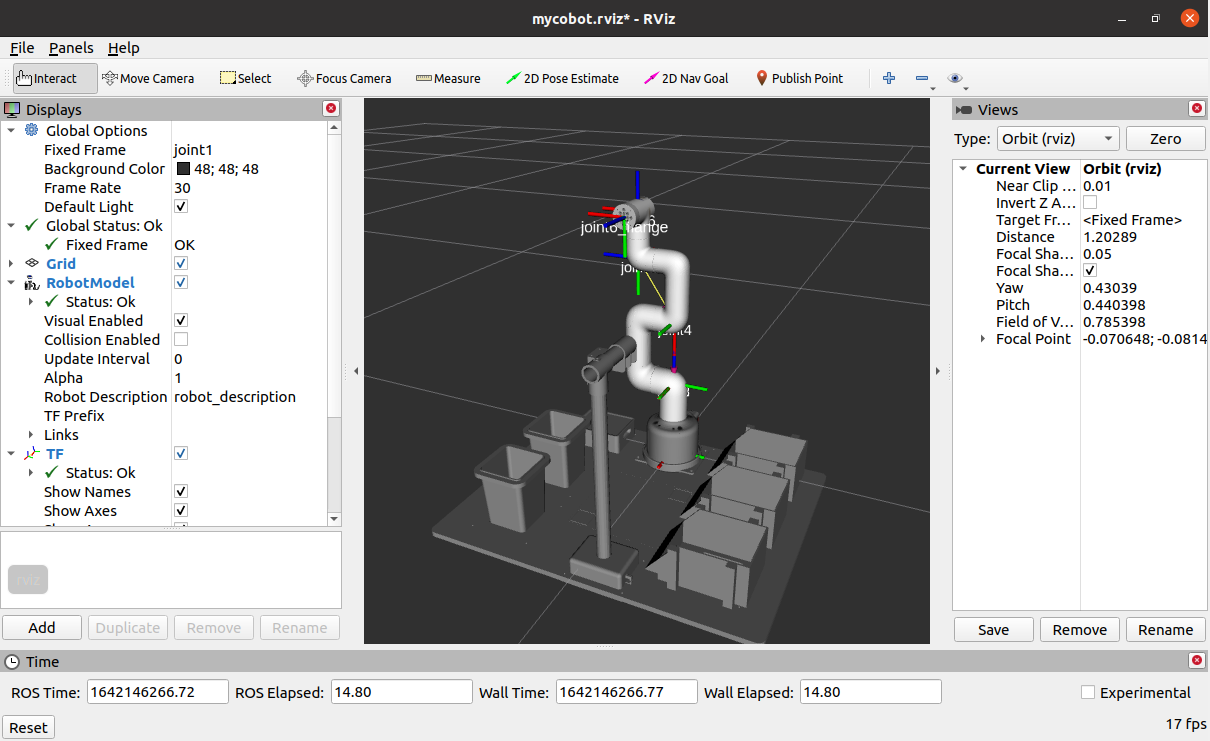
基于ROS的开发. ROS是开源的,是用于机器人控制的后操作系统或辅助操作系统. 利用ROS,可以在虚拟环境中实现机械手的仿真控制。 机器人手臂可以通过rviz平台可视化,并以多种方式操作机器人手臂。 它还可用于规划和执行机器人手臂的动作路径,以自由控制机器人手臂。安装ROS开发环境后 , 请到 使用案例 和 moveit的使用 了解更多信息.
2 Python
基于Python的开发. 我们的机器人支持Python,Python API库的开发也越来越完善。 机器人的关节角度、坐标、抓取器和其他方面可以通过Python进行控制。 请到 安装python环境了解更多信息.
1.3 如何重置系统
当系统因操作不当而损坏或设置错误且无法更改时,我们可以重新刻录系统映像并恢复初始设置(您需要SD卡读取器)
2 MyCobot 控制器
2.1 MyCobot Controller是什么
MyCobot Controller是一款通过蓝牙控制MyCobot系列机械臂的APP。 您可以使用手机移动机械臂。
2.2 如何安装 MyCobot Controller
如果您是安卓用户,请前往Google Play Store to download.

如果您是IOS用户,请等待软件发布后再搜索下载。
2.3 app介绍
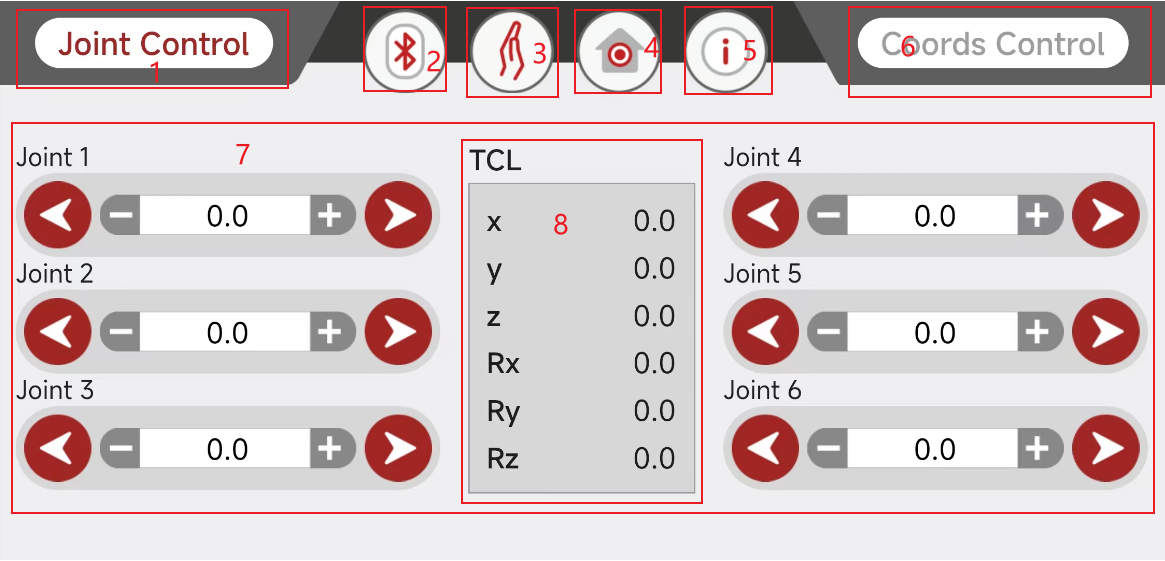
1 点击跳转到角度控制
2 蓝牙开关,如果您没有连接设备,点击按钮搜索蓝牙设备,否则会显示您当前连接的设备
3 开机和关机按钮,请在点击前连接您的设备,否则设备无法开机或关机。 单击按钮时,背景变为黄色,机械臂将通电。 再次点击后恢复原色,机械臂断电。
4 关节归零按钮,点击该按钮机械臂将归零,请连接蓝牙并开机后使用
5 软件资料
6 点击跳转到坐标控制
7 操作页面,如果选择关节控制,该页面会显示所有关节,否则显示所有坐标
8 坐标信息
2.4 如何使用 MyCobot Controller
在您开始使用之前,请先将MyCobot Controller App下载到您的手机上
然后按照以下步骤连接您的设备
如果您使用的是MyCobot M5设备,请为您的设备烧录minirobot v2.2
- 打开您的设备
依次选择Transponder -> Bluetooth,然后点击OK,会进入一个页面,里面有当前设备的一些信息和Bluetooth的Mac地址
如果您使用的是
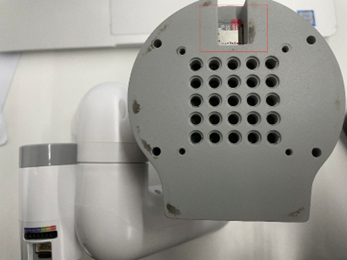
MyCobot PI设备,请按照以下步骤操作- 从github克隆pymycobot源代码到你的桌面
- 进入
demo文件夹下的mycobot_pi_bluetooth,打开命令行,运行sudo systemctl restart bluetooth - 接下来运行
python uart_peripheral_serial.py - 然后就可以找到你的PI设备了,如果你的设备没有出现在列表中,请重新执行第三步
接下来启动MyCobot Controller app,点击蓝牙开关,请允许软件所需的所有权限,否则可能无法扫描您的设备。然后等待设备扫描完成,列表将更新所有扫描到的设备,然后确认mac 您要连接的设备的地址,然后单击“连接”。
注意:连接PI设备时,点击连接后手机和设备需要进行配对,否则蓝牙会断开。
连接蓝牙后,需要点击开机按钮,即可控制机械臂的运动。
3 手柄控制
可通过手柄控制机器的移动,通过夹爪或者吸泵实现对物体的抓取。

4 基于Python 开发使用
我们的机器人支持Python,Python API库的开发也越来越完善。 可以通过Python控制机器人的关节角度、坐标、夹持器等方面。 参考安装python环境获取更多信息。
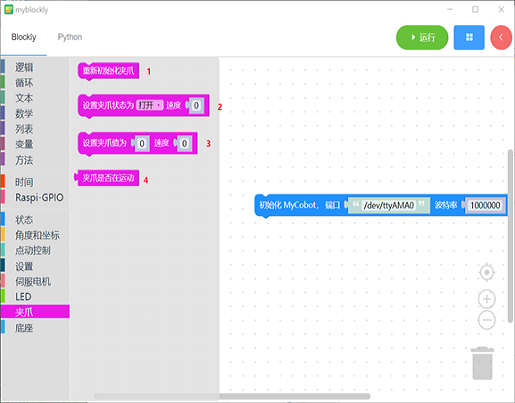
5 基于Blockly 开发使用
myBlockly是一款完全可视化的模块化编程软件,属于图形化编程语言。
6 基于ROS开发
ROS 是开源的,是用于机器人控制的一种后操作系统,或者说次级操作系统。通过ROS,我们能够在虚拟环境中实现对机械臂的仿真控制。我们将通过 rviz 平台实现对机械臂的可视化,并使用多种方式对我们的机械臂进行操作;通过moveit 平台进行机械臂行动路径的规划和执行,达到自由控制机械臂的效果。安装ROS开发环境后,具体可查看 使用案例 和moveit的使用。
Ros的出现解决了机器人各个部件的通信问题。 后来,越来越多的机器人算法被集成到ROS中。 ROS2继承了ROS,比ROS更强大更好。 与仅支持Linux系统的ROS相比,ROS2还支持windows、mac,甚至RTOS平台。安装ROS2开发环境 后, 具体可查看 ROS2 使用案例 。