10 Q&A
本章列举了使用myBlockly控制机械臂的常见问题以供参考。
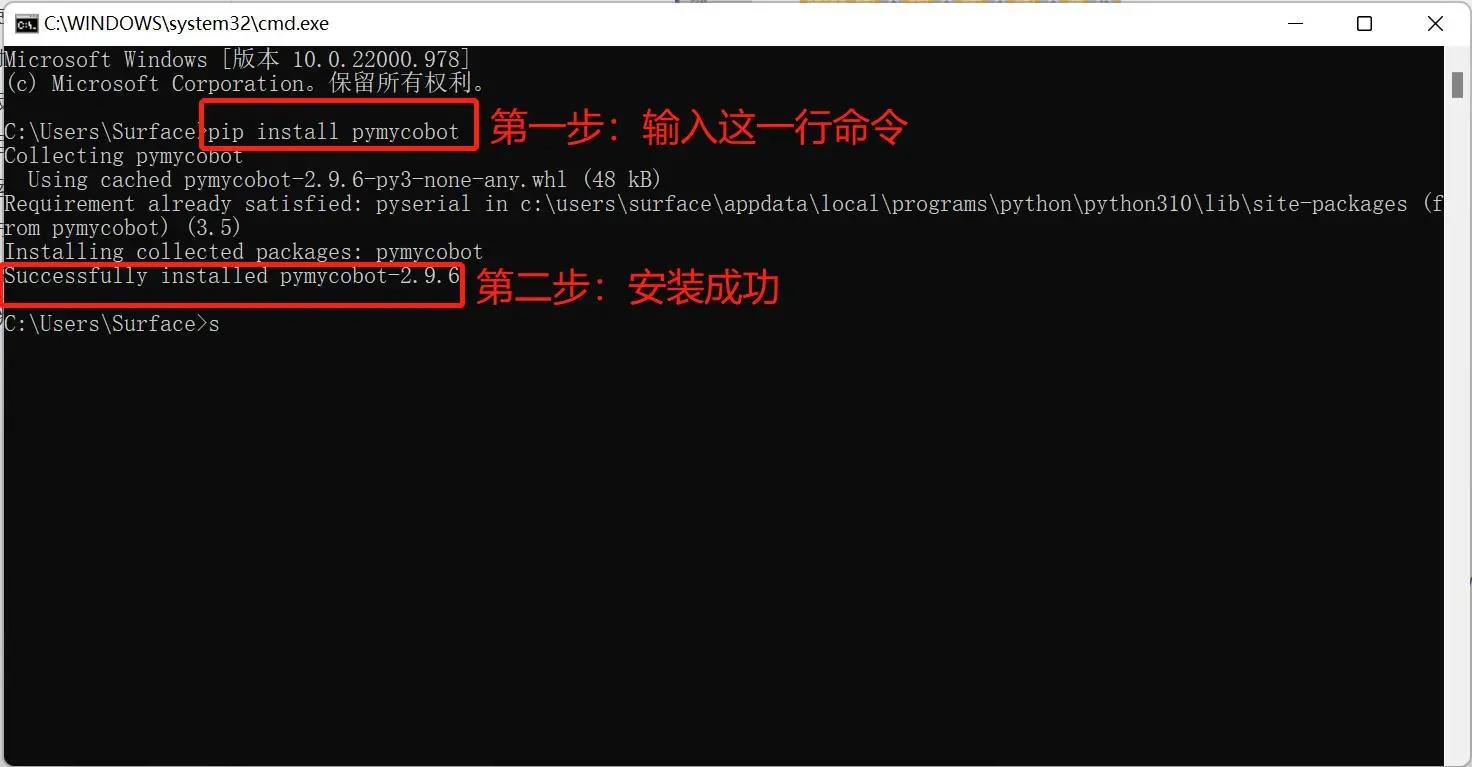
Q1:myBlockly运行时报错ModuleNotFoundError: No module named 'pymycobot'
A:这是由于在搭建Python环境时没有安装pymycobot库造成的。安装pymycobot库需要打开终端(Win键 +R键),输入:pip install pymycobot --upgrade --user,点击回车键出现Successfully installed pymycobot即为成功。
Q2:由于没有增加睡眠方法模块而导致机械臂无反应
A:操作机械臂运动的程序是需要时间来完成的,所以在一个动作之后需要接上一个睡眠模块,给机械臂运动的时间再进行下一个运动(视情况决定所需的时间,机械臂默认设定跑myBlockly最低的睡眠时间不低于0.5s),否则会导致机械臂无法达到理想的运动。
Q3:右上角的运行点不了,是灰绿色的。
A:新版myBlockly增加了检测机械臂串口通讯的功能。如果当前机械臂已经连接到了电脑,那就需要查看:
(1)是否有后台程序占用了机械臂的串口;
(2)右侧红色箭头下的工具栏中的是否关闭。如果打开,则需手动关闭。
Q4:为什么我运行程序之后一堆报错?
A:运行程序之前需要确认几点信息:
(1)请确认您的机械臂串口号与波特率都是正确的。
串口号查看方法:
- Windows系统找到设备管理器,查看端口。 若端口(COM和LPT) 显示 USB-Enhanced-SERIAL CH9102,则为 CP34X芯片。 若端口(COM和LPT) 显示 Silicon Labs CP210x USB to UART Bridge,则为 CP210X芯片。找到这两个名称的端口所对应的就是您机械臂的串口号。
- Linux系统打开终端,输入ls/dev/tty*回车。显示的就是机械臂的串口号。其中AMA0或者USB0 等就是您机械臂的串口号。
- Mac系统打开终端,输入cd/dev/ 回车,ls -al tty就可以找到了,比如/dev/tty.usbserial-10。
(2)请确认波特率是正确的。M5型号、myCobot 320 Pi-2020款、myCobot 320 Pi-2022款、myCobot 280 Jetson nano,myCobot 280 Arudino的波特率均为115200。myCobot 280 Pi、myPalletizer 260 Pi、mecahrm 270 Pi、myBuddy 280、Pro 600等波特率均为1000000。
(3)请确认蓝色框内的机型、串口号与波特率与右侧小工具栏内的一致,并且与机械臂相匹配。
Q5:报错 MyCobot.int() takes 2 positional arguments but 3 were given.
A:这个报错会在旧版本的myBlockly中出现,原因是myBlockly和pymycobot的版本对不上。更新myBlockly以及pymycobot驱动库的版本即可。
Q6:运行程序结果显示 child process exited with code 1 A:这个不是报错。是全部的程序都运行结束返回了二进制数字1。代表已经全部顺利运行完成。