上电与初步检测
1 机器人上电
操作前,请确认已阅读并确保已遵循第一章 安全须知的内容,确保操作安全。同时将电源适配器连接上机械臂,并将机械臂底座固定在桌子上。连接方式如图 3-1 所示:
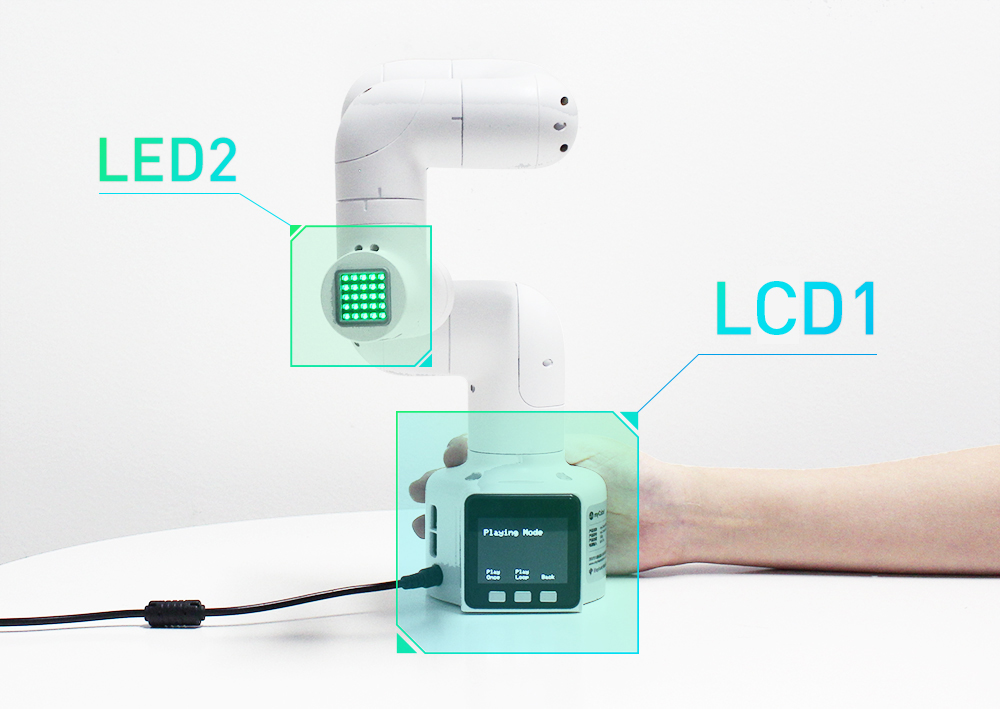
图 3-1
myCobot 必须使用外部电源进行供电,以提供足够的电量:
- Rated voltage: 12V
- Rated current: 3-5A
- Plug Type: DC 5.5mm x 2.1
注意,不能仅仅使用插入M5Stack-basic的TypeC进行供电。使用官方适配的电源,以免对机械臂造成损害。
2 与电脑通过USB连接
与电脑通过USB连接
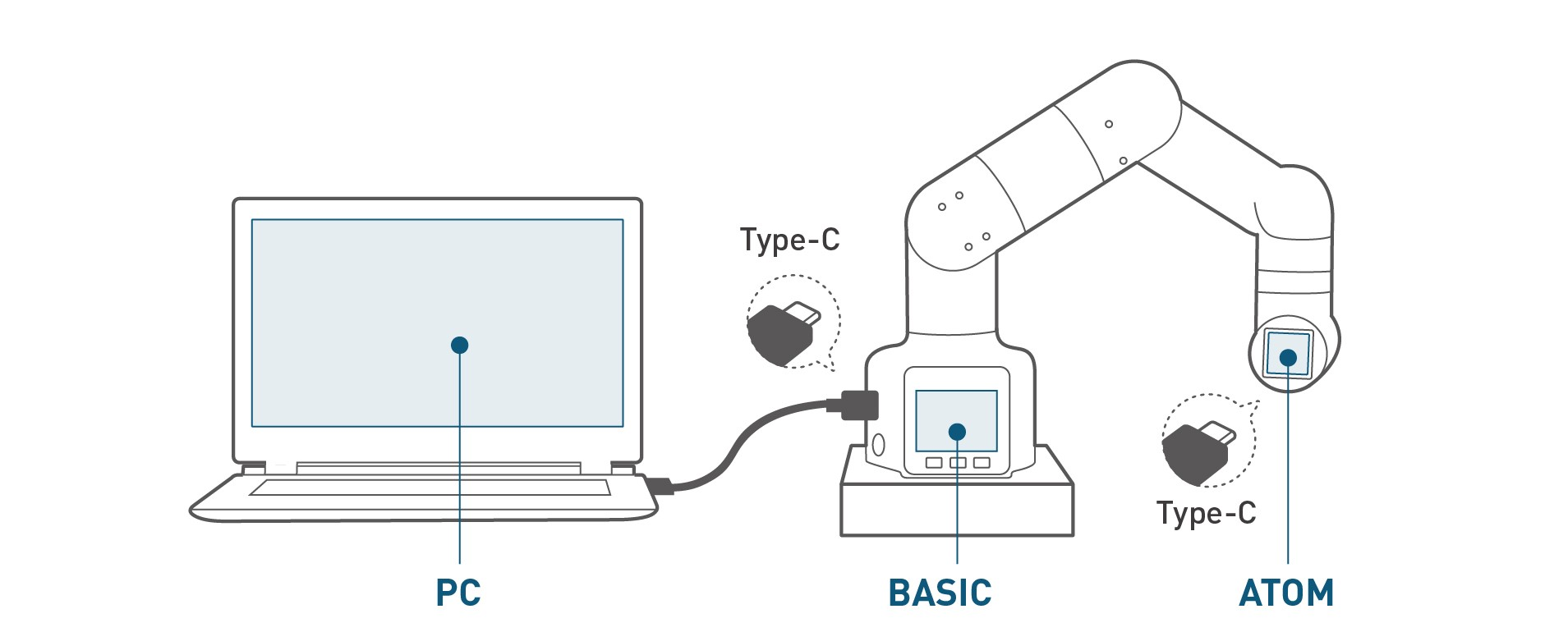
图 3-2 USB接口连示意图
- 使用Type-C线连接到电脑和机械臂M5Stack-basic的对应USB接口,并进行连接检测。连接检测是一项用于机械臂中电机以及 Atom 连接状态的检测功能。这项功能便于客户排除设备故障。
连接检测教程可参考 MyCobot-280 for M5 产品说明书-3.4.3 状态查询教学。
- 对于微控制器机械臂来说,我们通常对底座的M5Stack-basic发送控制指令,通过通讯转发,末端执行器将对指令进行解析,继而执行目标动作。
通讯转发检测教程可参考 MyCobot-280 for M5 产品说明书-3.4.4 通讯转发教学。
3 机器人工作状态检测
检测机器人的工作状态,请参阅章基本功能的应用程序