4 控制单关节运动
开始前准备
M5Stack系列:确保机械臂已经连接上电脑(具体信息请查阅5.1myBlockly)
其他系列:确保机器正常
本章学习内容
如何使用myBlockly,控制机械臂单关节运动
API介绍
方法模块:
设置关节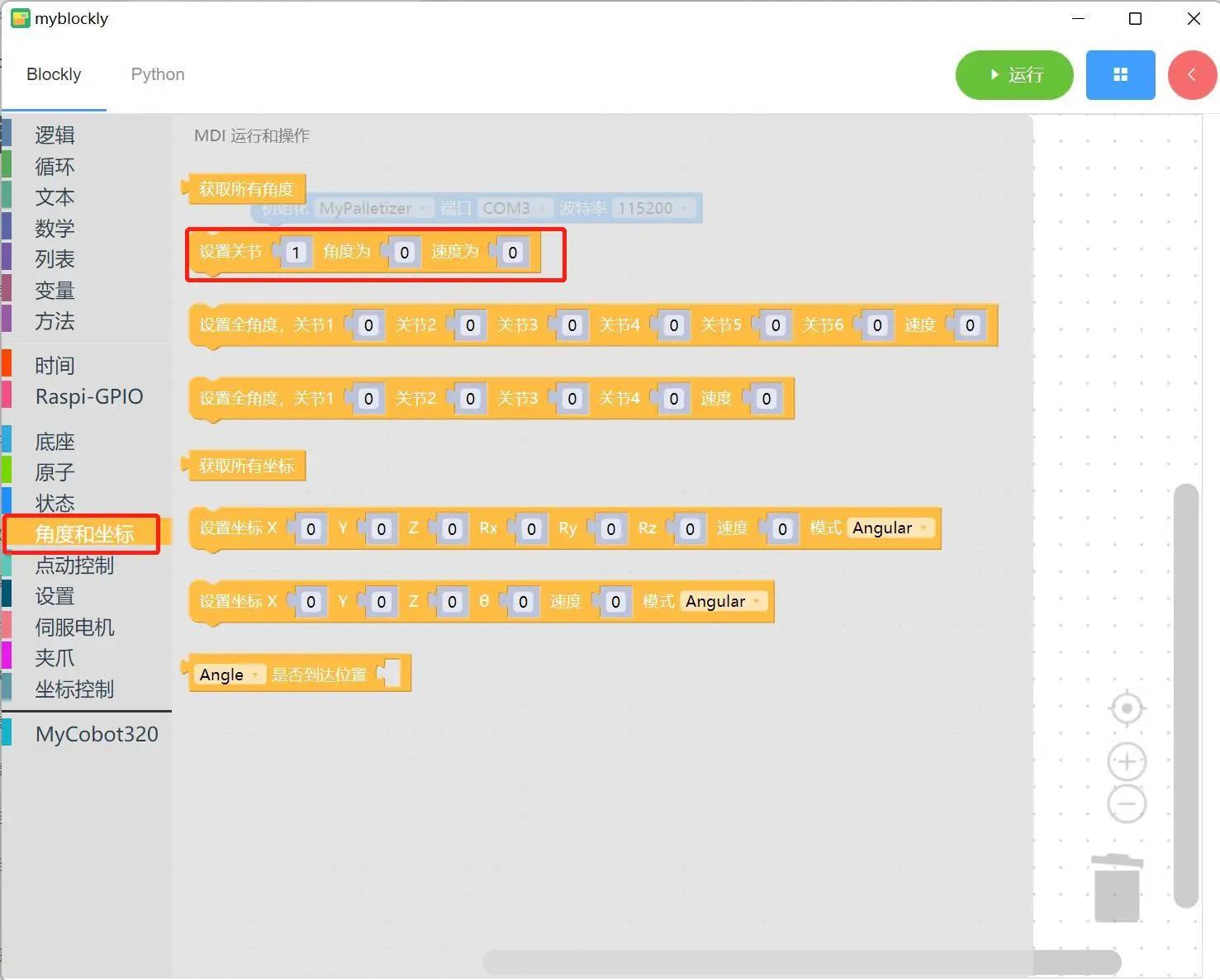

适用范围:myCobot280系列,myCobot320系列,mechArm系列、myPalletizer系列
参数介绍:
该方法有三个参数可以调整:
关节参数:myCobot280系列、myCobot320系列以及mechArm系列的参数范围为:1-6;myPalletizer系列的参数范围为:1-4(对应机械臂的关节)
角度参数:参考对应机型的参数(2.产品介绍)
- 速度(Speed):控制机械臂运动的速度,参数范围为:0~100
目的:控制机械臂单关节运动
简单演示
图形代码如下:
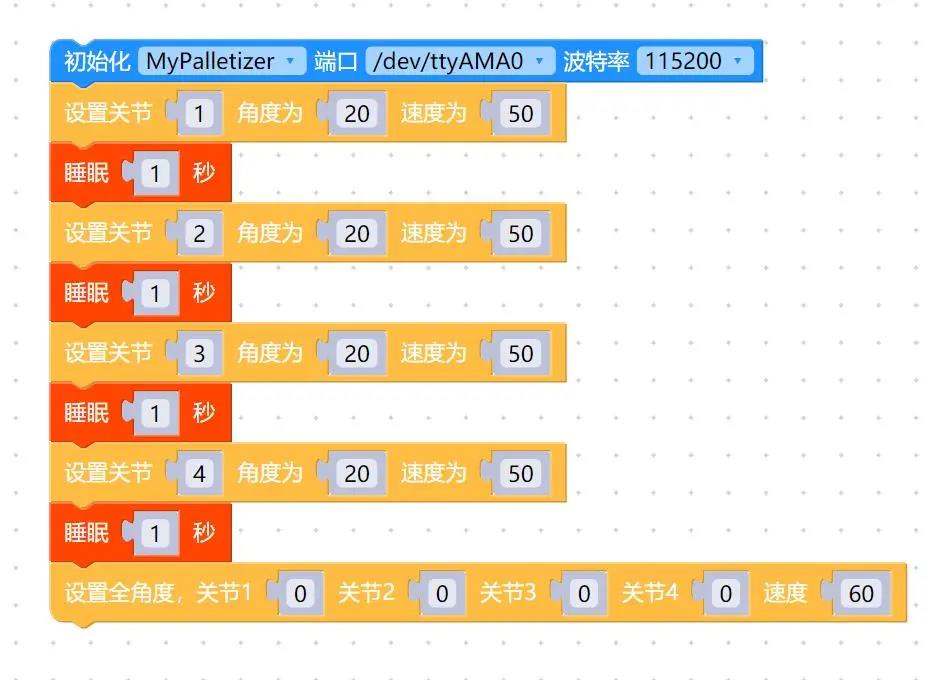
实现内容:
控制机械臂1关节,以速度50运行到1关节角度20的位置,过一秒后,
控制机械臂2关节,以速度50运行到2关节角度20的位置,过一秒后,
控制机械臂3关节,以速度50运行到3关节角度20的位置,过一秒后,
控制机械臂4关节,以速度50运行到4关节角度20的位置,过一秒后,
将机械臂所有关节以速度60回到原点,结束程序。