1 OpenCV简单使用
1.1 什么是OpenCV
openCV全称是Open Source Computer Vision Library。是Intel(英特尔)公司开源计算机视觉库,它有一系列C函数和C++类构成,实现了图像处理和计算机视觉方面的很多通用算法。
1.2 OpenCV的安装与使用
Windows
打开一个控制台终端(快捷键Win+R,输入cmd,进入终端),输入以下命令:
# 二者版本号需保持一致,这里安装4.6.0.66版本
pip install opencv-python==4.6.0.66
pip install opencv-contrib-python==4.6.0.66
- 安装验证
# 也可查看其他python库 格式:pip show 库名称
pip show opencv-python
pip show opencv-contrib-python

Linux
打开一个控制台终端(快捷键Ctrl+Alt+T),输入命令:
# 二者版本号需保持一致,这里安装4.6.0.66版本
pip install opencv-python==4.6.0.66
pip install opencv-contrib-python==4.6.0.66
简单使用
import cv2
def openCamera():
print('opencv版本',cv2.__version__)
print("键盘ESC退出")
cap = cv2.VideoCapture(0) # Linux
# cap = cv2.VideoCapture(1) # Windows
while cap.isOpened():
sucess,frame = cap.read()
if sucess:
cv2.imshow("frame",frame)
if cv2.waitKey(10)==27:
break
cap.release()
cv2.destroyAllWindows()
if __name__=="__main__":
openCamera()
2 末端执行器
myCobot Pro 独头吸泵:

连接机械臂右侧的 IO 引脚接口。

myCobot Pro 自适应夹爪:

- 具体连接请查看myCobot Pro 自适应夹爪 章节介绍。
3 坐标转换与标定
3.1 图像坐标转换与标定
3.1.1 四种坐标系
在机械臂视觉开发中,需要进行的一个重要预备工作是理解四个坐标系的意义,即相机坐标系、 世界坐标系、工具坐标系和基坐标系。
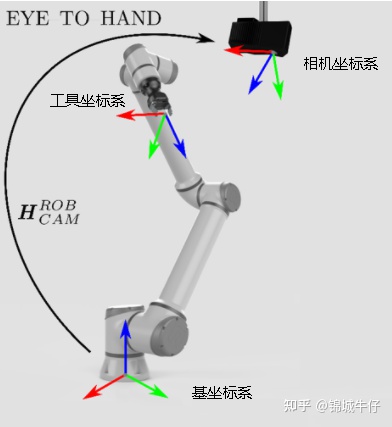
世界坐标系:世界坐标系(world coordinate),也称为测量坐标系,是一个三维直角坐标系,以其为基准可以描述相机和待测物体的空间位置。世界坐标系的位置可以根据实际情况自由确定。可以理解为大地坐标系。
相机坐标系:相机坐标系(camera coordinate),是一个三维直角坐标系,原点位于镜头光心处,x、y轴分别与相面的两边平行,z轴为镜头光轴,与像平面垂直。
工具坐标系:6轴或7轴的协作臂的工具坐标系,,原点一般为机械臂的末端中心,也叫做TCP(ToolCenterPoint),Z轴于末端轴心重合,指向末端的朝向。
基座标系:机械臂都有基坐标系,默认原点是协作臂底座的中心点。
3.1.2 相机标定
一个坐标系转换到另一个坐标系,主要包括两个方面:位置(原点)和姿态(XYZ轴向)。原点位置的变换叫做平移,姿态的变换叫做旋转
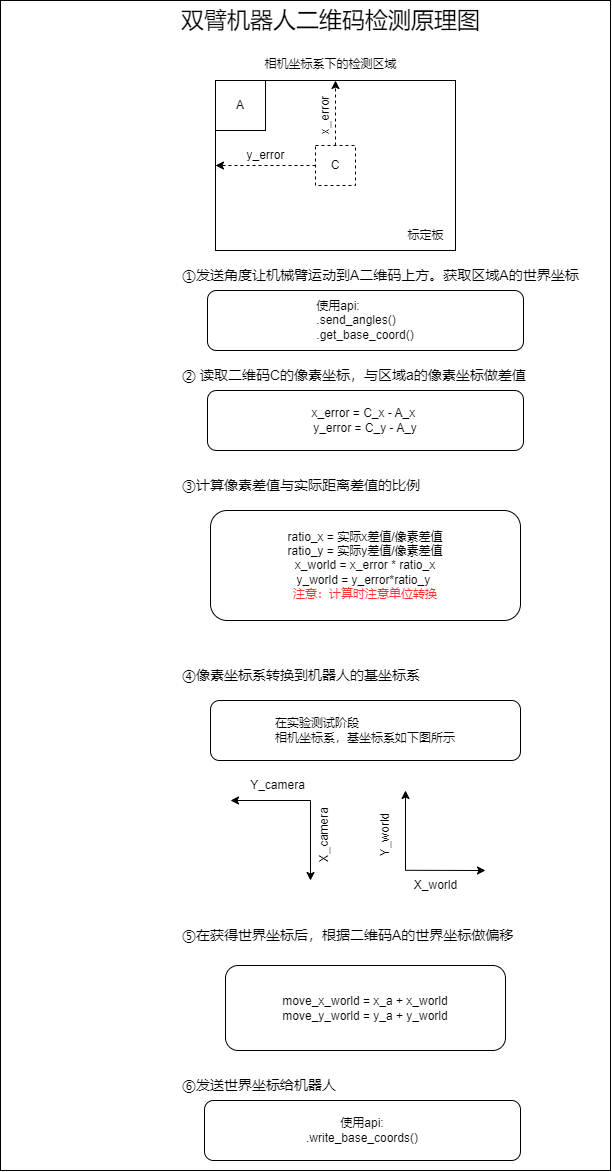
3.1.3 像素坐标系转换为基座标系
- 以双臂机械臂的视觉识别作为例
通过摄像头获取图像中的像素中心点的数值,与起始点的像素中心点做差值,得出像素差值之后。根据标定设置的比例对求出的像素差值做变换。转换为世界坐标系下的差值,机械臂在获得起始点的世界坐标之后,根据计算得出的世界坐标的差值,得出实际的所要抓取的世界坐标。将该坐标发送给机械臂,即可实现定位抓取。
3.2 机械臂坐标转换与标定
- 通过测量抓取区域中的两个aruco的像素点位可计算出两个aruco的之间的像素距离M1,测量两个aruco的实际距离M2,这样我们就能获得像素与实际距离的比值 ratio = M2 / M1。我们可以从图片中计算出物块距离抓取区域中心的像素差,这样我们可以计算出物块实际距离抓取区域中心的相对坐标(x1, y1)。将相对坐标(x1, y1)加上抓取区域中心到机械臂的相对坐标(x2, y2),即可求得物块对于机械臂的相对坐标(x3, y3)。
# 抓取中心点相对于机械臂的坐标
self.camera_x, self.camera_y = camera_x, camera_y
# 物体相对于机械臂的坐标,可以设置参数为:
self.c_x = self.c_y = 0, 0
# 像素与实际比值
self.ratio = 0
# 设置参数函数用于计算立方体和机械臂之间的坐标
def set_params(self, c_x, c_y, ratio):
self.c_x = c_x
self.c_y = c_y
self.ratio = 220.0/ratio
# 获取位置函数,用于计算立方体和机械臂之间的坐标
def get_position(self, x, y):
return ((y - self.c_y)*self.ratio + self.camera_x), ((x - self.c_x)*self.ratio + self.camera_y)
- 接下来,程序会调用设置参数函数 set_params(),用于 计算和设置计算物体和机械臂之间真实坐标的参数
detect.set_params(
(detect.sum_x1+detect.sum_x2)/20.0,
(detect.sum_y1+detect.sum_y2)/20.0,
abs(detect.sum_x1-detect.sum_x2)/10.0 +
abs(detect.sum_y1-detect.sum_y2)/10.0
)
- 然后将调用函数get_position() 用于 计算立方体和 mycobot 之间的真实坐标。
real_x, real_y = detect.get_position(x, y)
- 最终将获取的真实坐标经过稍微处理,将其传入 decide_move() 函数,供后续机械臂抓取使用。
detect.decide_move(real_sx/20.0, real_sy/20.0, detect.color)
注意事项
opencv-python 和 opencv-contrib-python 版本库需保持一致,且版本号大于 4.5.5。
当摄像头没有正确自动框出识别区域,需要关闭程序,调整摄像头的位置,可将摄像头向左向右移动等操作。
- 若命令终端没有出现ok,且无法识别颜色时,需要将摄像头稍微向后或向前移动一下,当命令终端出现ok时程序即可正常运行。
- OpenCV颜色识别会受环境的影响,若处在较为昏暗的环境下识别效果将大大降低。
- 进行yolov5图像识别时,为了更好的识别图片需要将物体反放在识别区域。
