开发环境的搭建
1 使用环境
Ubuntu(V-20.04)
mechArm 270-Pi 版本是自带Ubuntu(V-20.04)系统内置了Python、myStudio、myBlockly、ROS、OpenCV以及驱动库,所以无需下载开发软件和安装开发环境(额外的Python库需自行安装),且此版本系统可直接连接机械臂内置网络并通过VNC软件远程操控,无需连接显示器。
Ubuntu(V-18.04)
mechArm 270-Pi 系统还有Ubuntu(V-18.04)版本,如有需要,可下载镜像进行烧录和使用,具体操作步骤可查看章节15.2 镜像烧录,此版本系统同样内置了Python、myStudio、myBlockly、ROS、OpenCV以及驱动库,所以无需下载开发软件和安装开发环境(额外的Python库需自行安装),只需要准备一台显示器连接机械臂即可。
2 开发环境
mechArm 270-Pi版本内置开发环境,直接使用即可,目前我们提供的系统有Ubuntu(V-20.04)和Ubuntu(V-18.04)
以下是mechArm 270-Pi 版本支持的开发环境以及安装和使用教程:
Ubuntu(V-20.04)
在使用此版本系统前,若无显示器等设备,请先下载VNC Viewer;若有显示器则无需下载此软件进行远程控制,直接连接设备进行控制即可
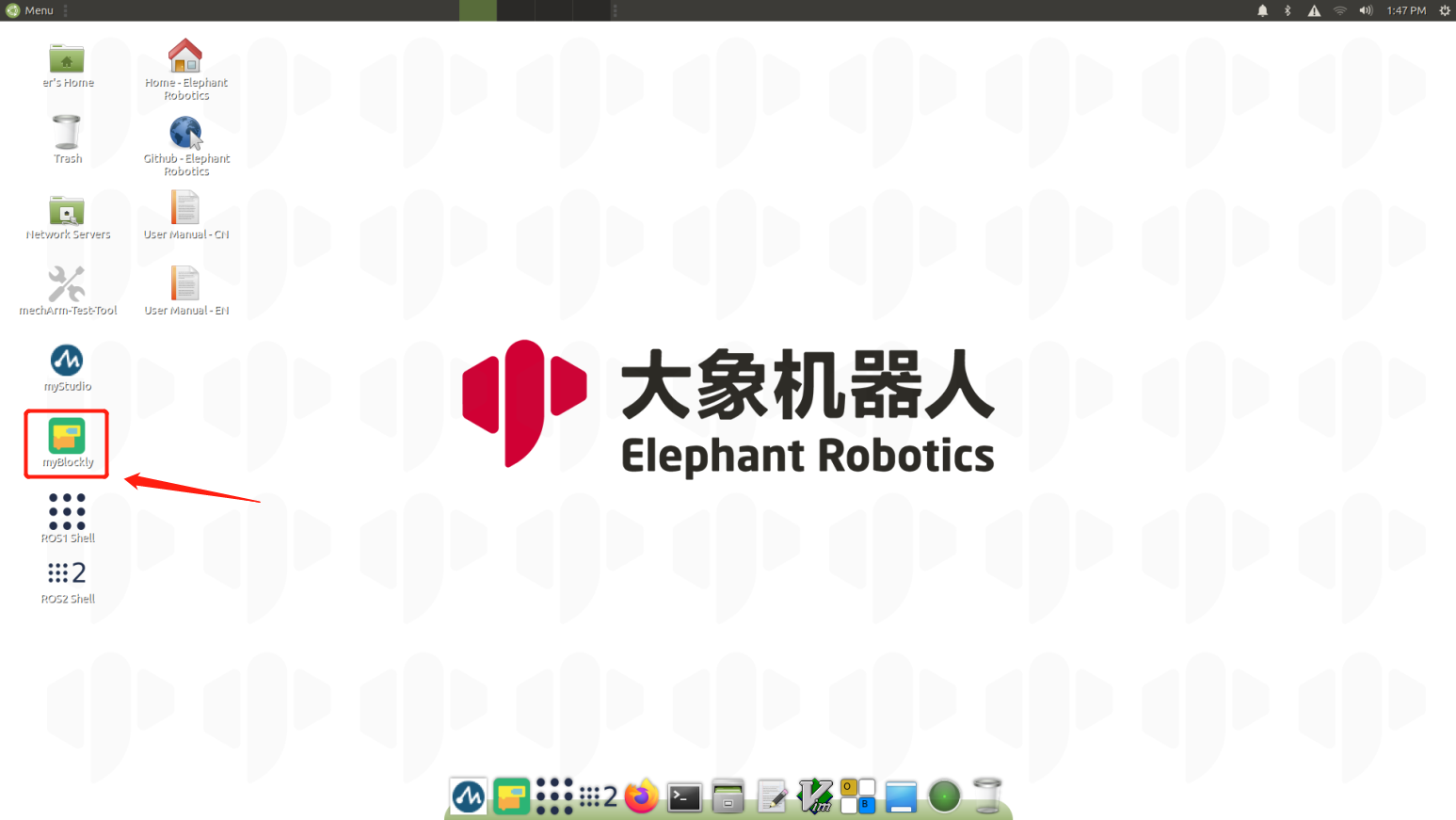
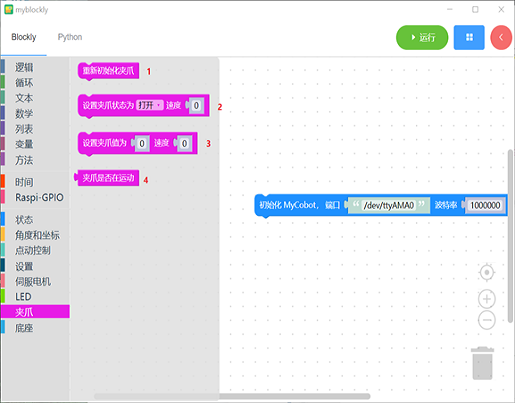
2.1 基于 Blockly 的开发使用 myBlockly体现拖拽式编程的思想,是一个图形化编程软件、可视化工具,用户可以通过拖曳模块,来构建代码逻辑,过程很像搭积木,可直接查看 myblockly使用案例 。
2.2 基于 Python 开发使用 我司产品对于python的支持较为友好,对于pythonAPI库的开发也日益完善,通过python能对机器人的关节角度,坐标,夹爪等多方面进行操控,选择性较多,用户在 安装python环境 后,可直接查看 使用案例。

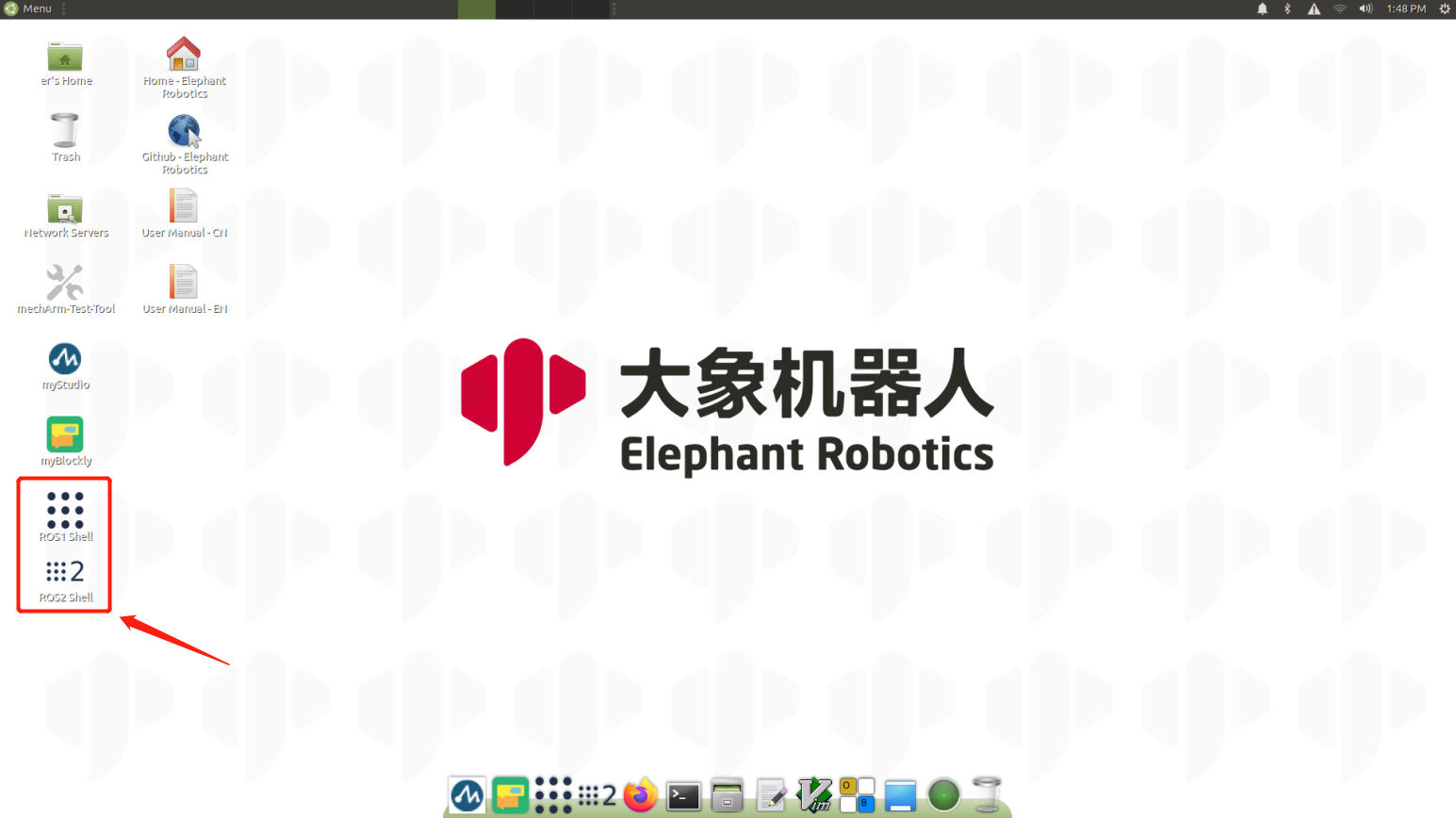
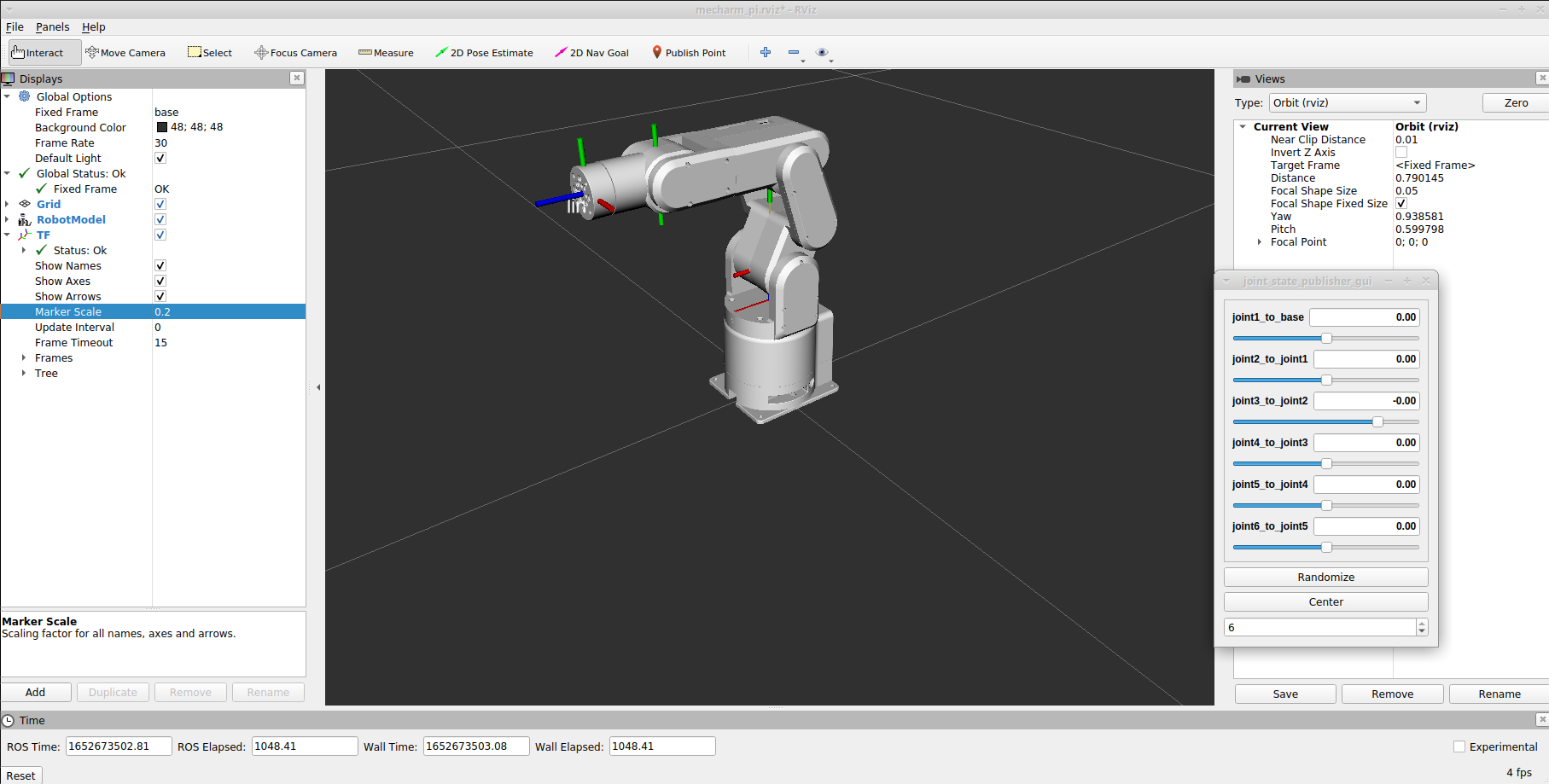
2.3 基于 ROS 开发使用 ROS 是开源的,是用于机器人控制的一种后操作系统,或者说次级操作系统。通过ROS,我们能够在虚拟环境中实现对机械臂的仿真控制。我们将通过 rviz 平台实现对机械臂的可视化,并使用多种方式对我们的机械臂进行操作;通过moveit 平台进行机械臂行动路径的规划和执行,达到自由控制机械臂的效果。用户在 安装ROS开发环境 后,即可查看 rviz简单使用 、ROS1案例 、ROS2案例 、 moveit的使用。
Ubuntu(V-18.04)
2.1 基于 Blockly 的开发使用 myBlockly体现拖拽式编程的思想,是一个图形化编程软件、可视化工具,用户可以通过拖曳模块,来构建代码逻辑,过程很像搭积木,可直接查看 myblockly使用案例 。
2.2 基于 Python 开发使用 我司产品对于python的支持较为友好,对于pythonAPI库的开发也日益完善,通过python能对机器人的关节角度,坐标,夹爪等多方面进行操控,选择性较多,用户在 安装python环境 后,可直接查看 使用案例。
2.3 基于 ROS 开发使用 ROS 是开源的,是用于机器人控制的一种后操作系统,或者说次级操作系统。通过ROS,我们能够在虚拟环境中实现对机械臂的仿真控制。我们将通过 rviz 平台实现对机械臂的可视化,并使用多种方式对我们的机械臂进行操作;通过moveit 平台进行机械臂行动路径的规划和执行,达到自由控制机械臂的效果。用户在 安装ROS开发环境 后,即可查看 rviz简单使用 、ROS1案例 、ROS2案例 、 moveit的使用。
3 固件的更新
mechArm 270-Pi版本的Atom固件的更新需要使用myStudio进行更新。
myStudio的安装和使用教程: